inav
 inav copied to clipboard
inav copied to clipboard
INAV: Navigation-enabled flight control software

## Current Behavior I was flying my fresh configured INAV 5 Wing yesterday and landed it after 50m (launch aborted- to little throttle). After having the wing at hand again...
## Current Behavior Although #7924 adds support for support for MATEKF405TE target (from release_5.0.0), DSHOT does not work on S3 output (PB15). As @MATEKSYS suggests in #7656 and on [Matek's...
## Current Behavior inav allows for servo_protocol to be set to either PWM or Sbus ## Desired Behavior I'd like to have a crossfire output for servos ## Who does...
Could a script like Betaflight be created or adapted? It would be very practical! I have tried various versions of the BF Lua but they don't work with Inav. 😢...
## Current Behavior Matek F405-AIO board. Flashed with INAV V5. Continuously trim servos enabled. Cant' see in MODES - AUTOLEVEL barometer BMP280 connected to I2C and work fine 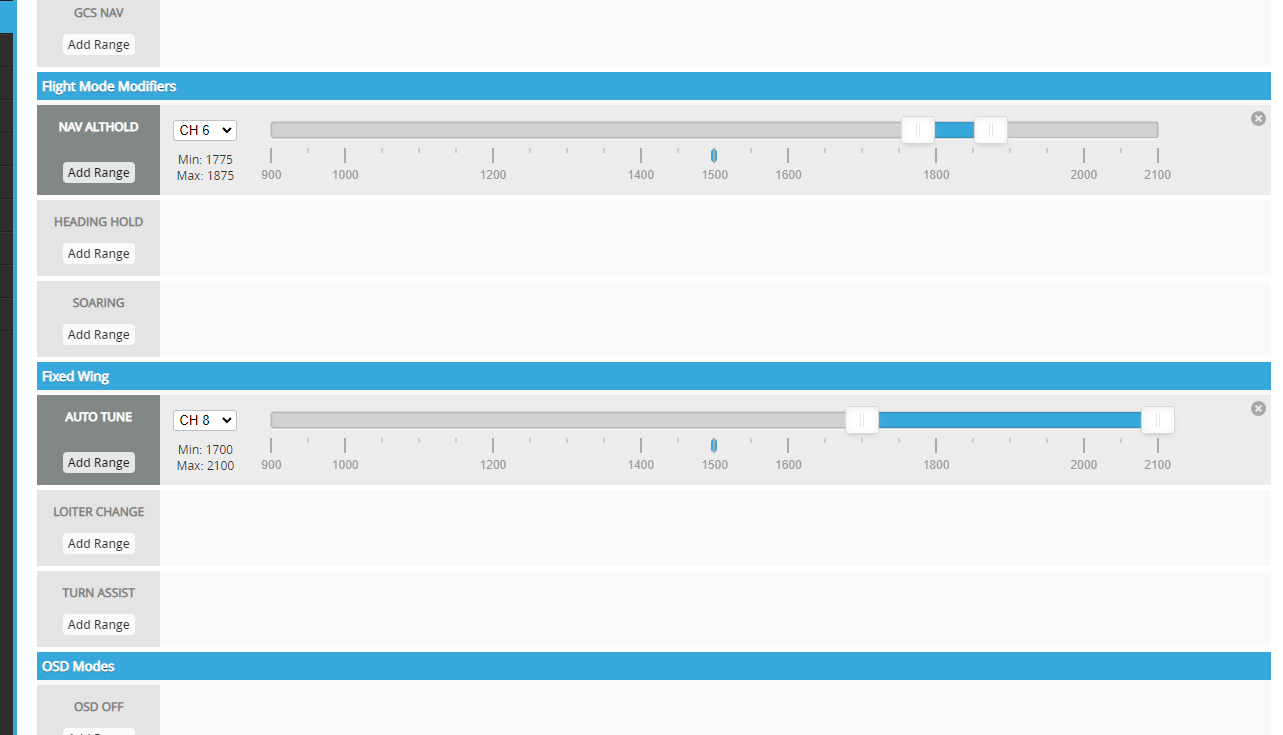 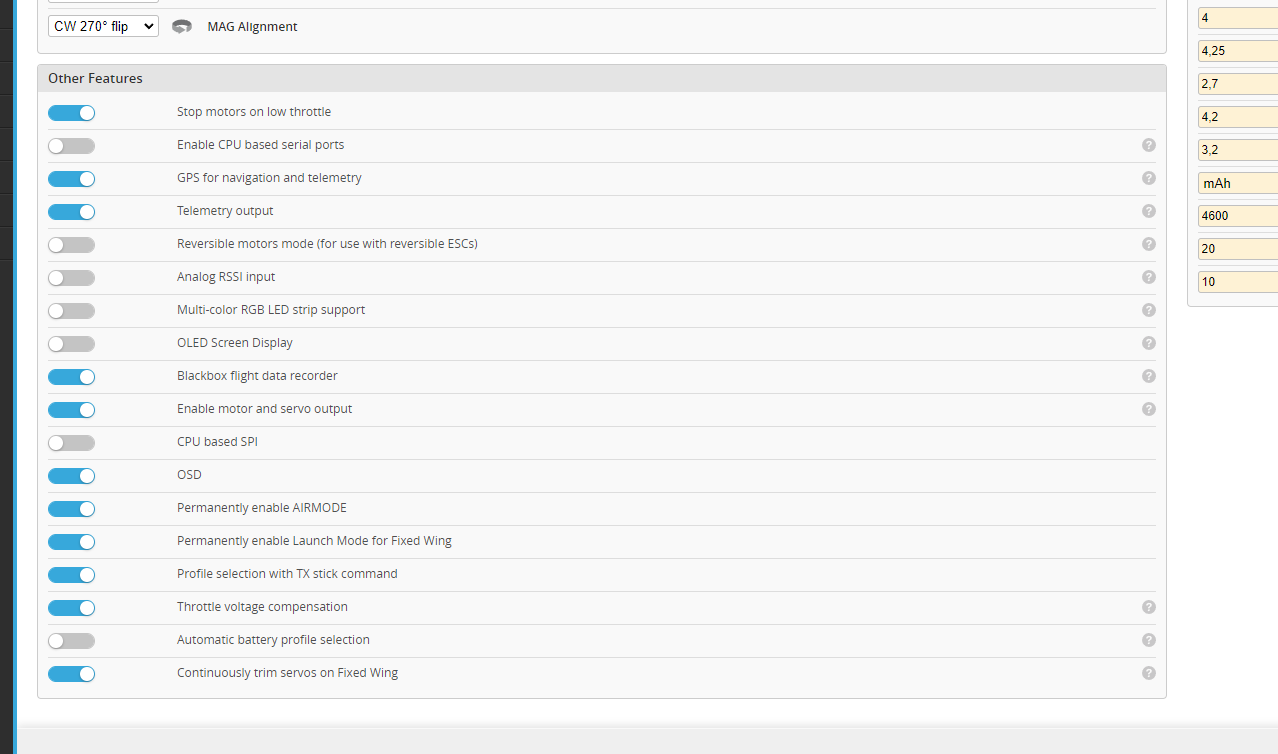...
## Current Behavior Currently autolevel is only active in angle and horizon modes, together with some extra checks. See src/main/flight/pid.c line 1326 ## Desired Behavior Since nav course hold is...
As of 2020-07-09, the following CLI settings are not documented in `settings.yaml`. - [ ] gyro_notch_hz - [ ] gyro_notch_cutoff - [ ] gyro_kalman_enabled - [ ] gyro_kalman_q - [...
## Current Behavior During alt HOLD throttle acts irregularly and suddenly punch out with no reason. Pos HOLD it just not hold but unexpected hold behavior ## Steps to Reproduce...
hello,please help to add new target 'AOCODARCF4'. It has been tested and validated. it can upload it officially! thanks for your work!
Metadata
Owner
Metadata
INAV: Navigation-enabled flight control software