Matek F405-AIO can't see AUTOLEVEL mode
Current Behavior
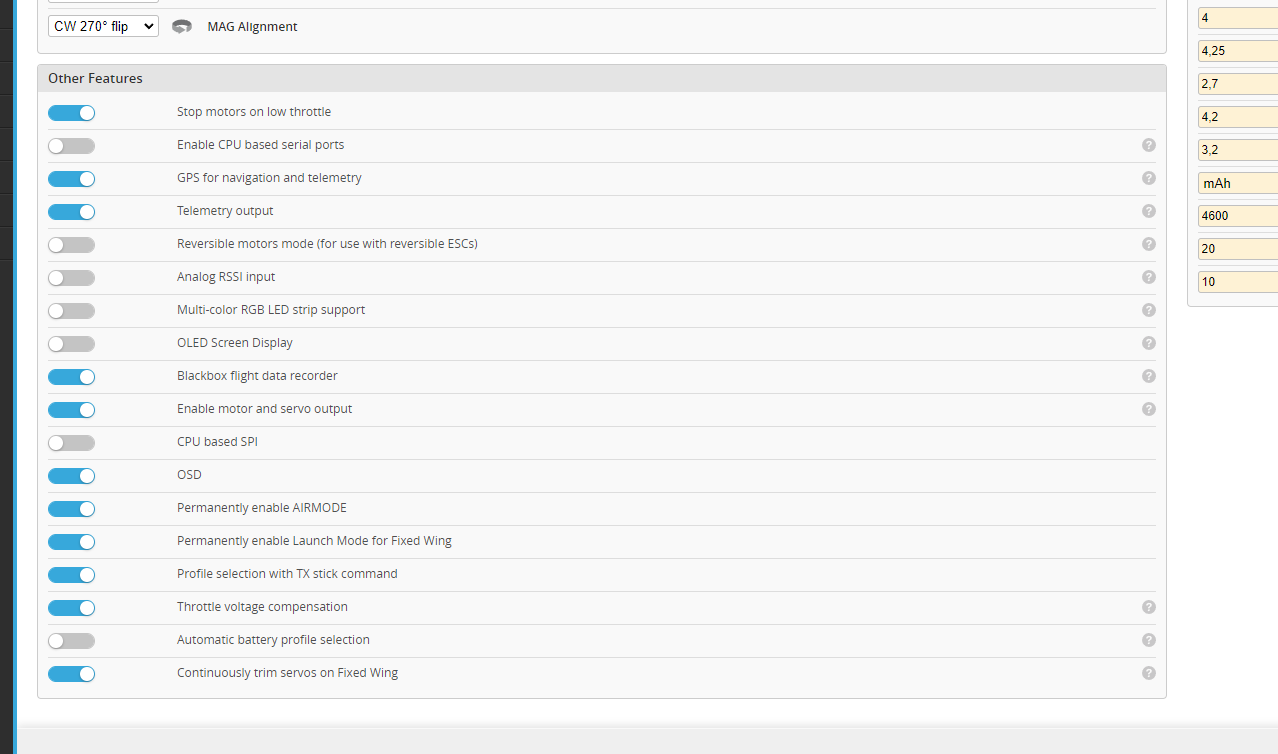
Matek F405-AIO board. Flashed with INAV V5. Continuously trim servos enabled. Cant' see in MODES - AUTOLEVEL barometer BMP280 connected to I2C and work fine
Steps to Reproduce
- Flash MATEK F405-AIO with MATEKF405 firmware V5
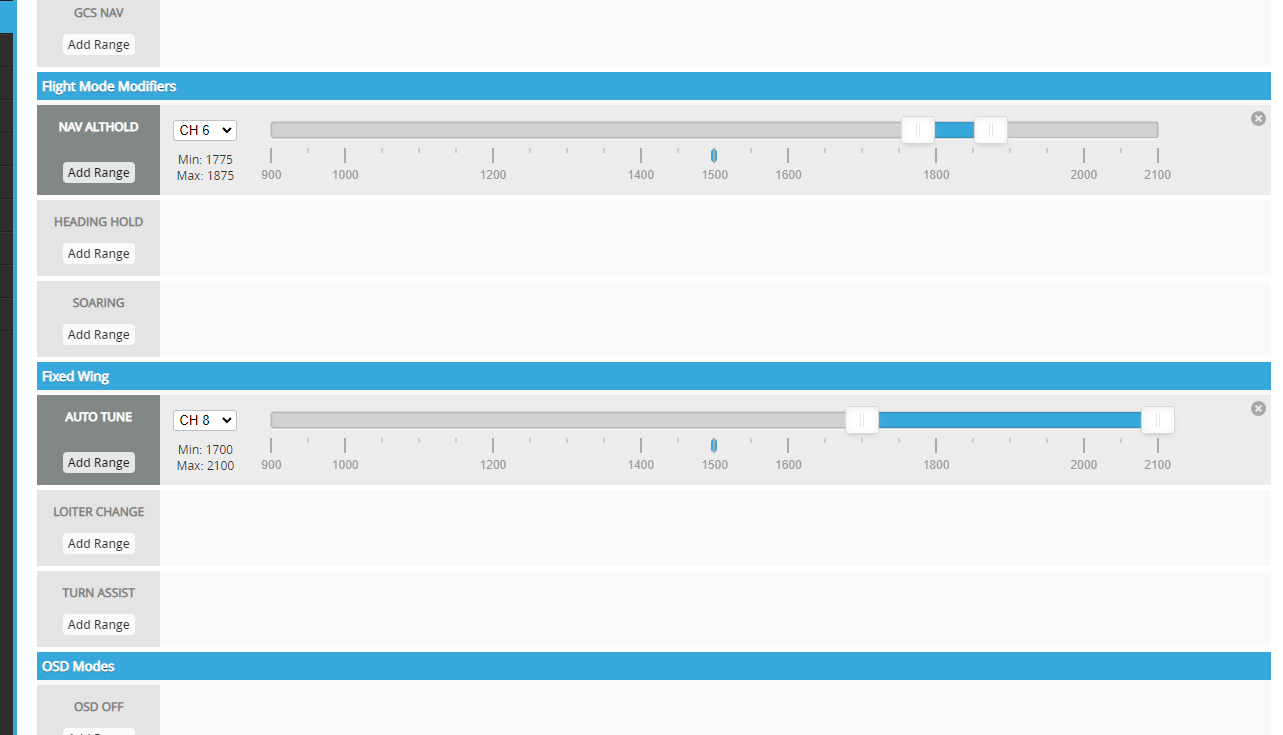
- go to MODES tab
- no "AUTOLEVEL" mode in list
Expected behavior
AUTOLEVEL mode in list available
Suggested solution(s)
Additional context
version
INAV/MATEKF405 5.0.0 Jun 20 2022 / 10:56:14 (d2adf35c)
GCC-10.2.1 20201103 (release)
start the command batch
batch start
resources
mixer
mmix reset
mmix 0 1.000 0.000 0.000 0.000 mmix 1 1.000 0.000 0.000 0.000
servo mix
smix reset
smix 0 1 0 50 0 -1 smix 1 1 1 50 0 -1 smix 2 2 0 -50 0 -1 smix 3 2 1 50 0 -1
servo
servo 1 1000 2000 1468 -100 servo 2 1000 2000 1448 100 servo 3 1000 2000 1500 -100
safehome
logic
gvar
pid
feature
feature -TX_PROF_SEL feature THR_VBAT_COMP feature MOTOR_STOP feature GPS feature BLACKBOX feature PWM_OUTPUT_ENABLE feature FW_LAUNCH feature FW_AUTOTRIM
beeper
beeper -ON_USB
blackbox
blackbox -NAV_ACC blackbox NAV_POS blackbox NAV_PID blackbox MAG blackbox ACC blackbox ATTI blackbox RC_DATA blackbox RC_COMMAND blackbox MOTORS
map
serial
serial 2 2097152 115200 115200 0 115200 serial 3 256 115200 115200 0 115200 serial 4 2 115200 115200 0 115200
led
color
mode_color
aux
aux 0 0 0 1600 2100 aux 1 1 1 1275 1375 aux 2 12 1 1100 1225 aux 3 53 1 1775 1875 aux 4 11 1 1625 1725 aux 5 10 1 1950 2075 aux 6 28 1 1450 1550 aux 7 3 1 1775 1875 aux 8 21 3 1700 2100 aux 9 13 8 1600 2100
adjrange
rxrange
temp_sensor
wp
#wp 0 invalid
osd_layout
osd_layout 0 0 14 1 V osd_layout 0 1 1 11 V osd_layout 0 3 8 6 V osd_layout 0 7 12 15 V osd_layout 0 8 14 11 V osd_layout 0 9 1 13 H osd_layout 0 11 1 14 V osd_layout 0 12 1 13 V osd_layout 0 13 24 7 V osd_layout 0 14 17 1 V osd_layout 0 15 1 7 V osd_layout 0 20 1 2 V osd_layout 0 21 1 1 V osd_layout 0 22 10 15 V osd_layout 0 23 24 6 V osd_layout 0 24 23 1 V osd_layout 0 25 5 5 H osd_layout 0 26 1 8 V osd_layout 0 28 22 14 V osd_layout 0 30 0 12 V osd_layout 0 31 12 5 H osd_layout 0 32 1 12 V osd_layout 0 33 1 13 H osd_layout 0 34 11 2 H osd_layout 0 35 16 13 V osd_layout 0 38 9 14 H osd_layout 0 40 23 13 V osd_layout 0 41 1 3 V osd_layout 0 42 1 4 V osd_layout 0 45 0 0 V osd_layout 0 46 0 8 H osd_layout 0 47 23 10 H osd_layout 0 53 9 13 V osd_layout 0 85 24 7 H osd_layout 0 86 1 15 V osd_layout 0 87 0 15 H osd_layout 0 88 1 6 H osd_layout 0 107 1 5 V osd_layout 1 0 14 1 V osd_layout 1 1 2 1 V osd_layout 1 3 8 6 V osd_layout 1 7 1 3 H osd_layout 1 9 1 13 H osd_layout 1 11 1 14 H osd_layout 1 12 24 14 H osd_layout 1 13 25 5 V osd_layout 1 14 18 1 H osd_layout 1 15 24 2 V osd_layout 1 16 2 9 V osd_layout 1 17 2 10 V osd_layout 1 20 1 2 H osd_layout 1 21 1 1 H osd_layout 1 22 23 1 H osd_layout 1 23 24 1 V osd_layout 1 24 13 1 H osd_layout 1 26 2 8 H osd_layout 1 28 22 14 H osd_layout 1 30 1 3 V osd_layout 1 31 21 4 H osd_layout 1 32 1 12 H osd_layout 1 33 1 13 H osd_layout 1 34 11 2 H osd_layout 1 35 16 13 H osd_layout 1 38 2 2 V osd_layout 1 40 23 13 H osd_layout 1 41 2 5 V osd_layout 1 42 2 4 H osd_layout 1 45 0 0 V osd_layout 1 46 23 8 H osd_layout 1 47 23 10 H osd_layout 1 62 2 8 H osd_layout 1 63 2 8 V osd_layout 1 67 2 12 V osd_layout 1 68 2 13 V osd_layout 1 85 22 7 H osd_layout 1 86 1 4 H osd_layout 1 87 0 10 H osd_layout 2 0 14 1 V osd_layout 2 1 1 13 V osd_layout 2 3 8 6 V osd_layout 2 7 1 3 H osd_layout 2 9 1 13 H osd_layout 2 11 1 14 V osd_layout 2 12 24 14 V osd_layout 2 13 23 7 V osd_layout 2 14 1 2 V osd_layout 2 15 2 7 V osd_layout 2 16 2 10 V osd_layout 2 17 2 11 V osd_layout 2 18 2 12 V osd_layout 2 20 19 1 V osd_layout 2 21 1 1 V osd_layout 2 22 23 2 V osd_layout 2 23 24 2 V osd_layout 2 24 13 1 H osd_layout 2 26 2 8 H osd_layout 2 28 22 14 H osd_layout 2 30 1 4 V osd_layout 2 31 21 4 H osd_layout 2 32 1 12 H osd_layout 2 33 1 13 H osd_layout 2 34 11 2 H osd_layout 2 35 16 13 H osd_layout 2 38 25 13 V osd_layout 2 40 23 13 H osd_layout 2 44 0 0 V osd_layout 2 45 0 0 V osd_layout 2 46 23 9 H osd_layout 2 47 23 10 H osd_layout 2 85 22 7 H osd_layout 2 86 1 4 H osd_layout 2 87 0 10 H osd_layout 3 0 2 2 V osd_layout 3 1 24 10 V osd_layout 3 7 14 1 V osd_layout 3 9 24 6 V osd_layout 3 10 2 1 V osd_layout 3 11 25 8 V osd_layout 3 15 1 7 V osd_layout 3 16 7 2 V osd_layout 3 17 7 3 V osd_layout 3 18 7 4 V osd_layout 3 19 25 7 V osd_layout 3 26 1 8 V osd_layout 3 27 0 5 V osd_layout 3 28 23 1 V osd_layout 3 30 1 12 V osd_layout 3 31 24 3 H osd_layout 3 32 24 9 V osd_layout 3 33 24 5 V osd_layout 3 41 1 9 V osd_layout 3 42 1 10 V osd_layout 3 56 7 10 V osd_layout 3 57 7 11 V osd_layout 3 58 7 11 H osd_layout 3 61 16 6 H osd_layout 3 62 16 6 H osd_layout 3 63 7 6 V osd_layout 3 67 2 13 V osd_layout 3 68 2 14 V osd_layout 3 75 7 5 V osd_layout 3 76 16 5 V osd_layout 3 77 16 6 V osd_layout 3 85 1 6 V osd_layout 3 108 7 4 H osd_layout 3 109 7 7 V osd_layout 3 110 22 11 H osd_layout 3 111 23 9 H
master
set gyro_main_lpf_hz = 25 set dynamic_gyro_notch_q = 250 set dynamic_gyro_notch_min_hz = 30 set gyro_zero_x = 10 set gyro_zero_y = -3 set gyro_zero_z = -7 set ins_gravity_cmss = 978.841 set acc_hardware = MPU6500 set acczero_x = -8 set acczero_y = -11 set acczero_z = -50 set accgain_x = 4088 set accgain_y = 4084 set accgain_z = 4071 set align_mag = CW270FLIP set mag_hardware = NONE set baro_hardware = BMP280 set max_throttle = 1950 set motor_pwm_protocol = STANDARD set failsafe_procedure = RTH set bat_voltage_src = SAG_COMP set platform_type = AIRPLANE set model_preview_type = 8 set imu_dcm_ki = 0 set small_angle = 180 set imu_acc_ignore_rate = 8 set imu_acc_ignore_slope = 3 set disarm_kill_switch = OFF set applied_defaults = 3 set gps_provider = UBLOX7 set gps_sbas_mode = EGNOS set airmode_type = STICK_CENTER_ONCE set nav_extra_arming_safety = ALLOW_BYPASS set nav_wp_radius = 1500 set nav_manual_climb_rate = 800 set nav_land_slowdown_minalt = 800 set nav_land_slowdown_maxalt = 2500 set nav_emerg_landing_speed = 200 set nav_min_rth_distance = 0 set nav_rth_allow_landing = FS_ONLY set nav_rth_alt_mode = AT_LEAST_LINEAR_DESCENT set nav_rth_abort_threshold = 60000 set nav_rth_altitude = 5000 set nav_fw_bank_angle = 45 set nav_fw_climb_angle = 30 set nav_fw_dive_angle = 30 set nav_fw_pitch2thr_smoothing = 3 set nav_fw_loiter_radius = 6000 set nav_fw_cruise_speed = 1400 set nav_fw_control_smoothness = 3 set nav_fw_launch_velocity = 250 set nav_fw_launch_accel = 1500 set nav_fw_launch_detect_time = 30 set nav_fw_launch_motor_delay = 120 set nav_fw_launch_spinup_time = 150 set nav_fw_launch_timeout = 8000 set nav_fw_launch_climb_angle = 25 set nav_fw_allow_manual_thr_increase = ON set frsky_pitch_roll = ON set smartport_fuel_unit = PERCENT set mavlink_version = 1 set osd_rssi_alarm = 40 set osd_time_alarm = 30 set osd_alt_alarm = 2000 set osd_dist_alarm = 5000 set osd_current_alarm = 20 set osd_crosshairs_style = TYPE3 set osd_sidebar_scroll_arrows = ON set osd_speed_source = 3D set i2c_speed = 800KHZ set name = :WDTE set dji_esc_temp_source = IMU
profile
profile 1
set fw_p_pitch = 15 set fw_i_pitch = 5 set fw_d_pitch = 5 set fw_ff_pitch = 172 set fw_p_roll = 15 set fw_i_roll = 3 set fw_d_roll = 7 set fw_ff_roll = 67 set fw_p_yaw = 20 set fw_i_yaw = 0 set fw_ff_yaw = 100 set max_angle_inclination_rll = 550 set dterm_lpf_hz = 10 set fw_turn_assist_pitch_gain = 0.200 set nav_fw_pos_z_p = 15 set nav_fw_pos_z_d = 5 set nav_fw_pos_xy_p = 60 set d_boost_min = 1.000 set d_boost_max = 1.000 set fw_level_pitch_trim = 3.657 set rc_expo = 30 set rc_yaw_expo = 30 set roll_rate = 19 set pitch_rate = 7 set yaw_rate = 3
battery_profile
battery_profile 1
set bat_cells = 4 set vbat_min_cell_voltage = 270 set vbat_warning_cell_voltage = 320 set battery_capacity = 4600 set battery_capacity_warning = 920 set battery_capacity_critical = 460 set throttle_idle = 5.000 set nav_fw_cruise_thr = 1450 set nav_fw_min_thr = 1100 set nav_fw_max_thr = 2000 set nav_fw_pitch2thr = 13 set nav_fw_launch_thr = 1950
end the command batch
batch end
That flight controller doesn't have a barometer. Barometer is required for AUTO LEVEL.