wly2020-robot
wly2020-robot
ground truth?调试代码好像没动过这个,没明白,能详细点吗?
训练模板取的矩形区域(130,110,270,270),那实际模板中心点就是(130+270/2,110+270/2)->(265,245)
这样就能看出精度
嗯,你说的对!我在试试。
顺便问一下,能匹配部分被遮挡的物体吗?
自己写一个接口嘛
你好,github打不开,就在邮箱给你发信息请教。我在用fusion+icp分支测试物料定位时,匹配分数设置为90,会出现检测出来的角度会有180度的偏差,我猜测是物料对称比较强导致的.附件给出原始图,和训练图,麻烦分析一下,谢谢。 ------------------ 原始邮件 ------------------ 发件人: "meiqua/shape_based_matching"
不好意思哈。在QQ邮箱上上传可能没成功。  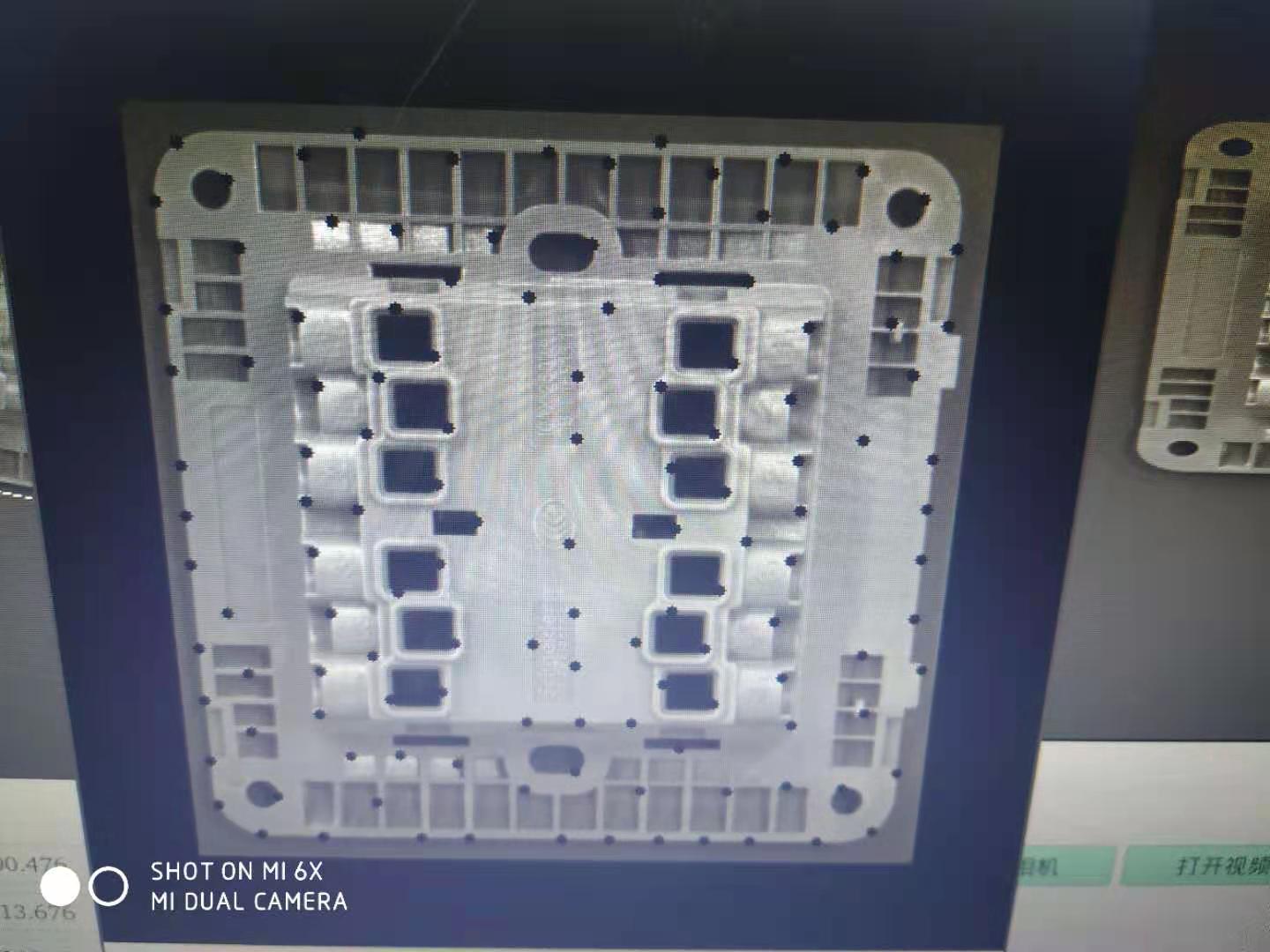
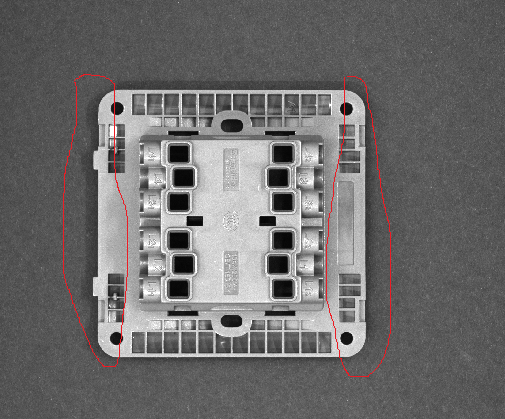 检测出来的角度会偏差180度,图标记位置翻转180度。