wly2020-robot
wly2020-robot
> @linxionggege @Joe1W 可以參考我的github,shape matching的替代方案 https://github.com/DennisLiu1993/Fastest_Image_Pattern_Matching 请问大神有没有基于meiqua的算法做目标检测对象任意点位跟踪的功能实现?
line2Dup::Detector detector(128, { 4,8 });对于这个设置,步长是不是就是2呢?我应用icp,得到的结果是: 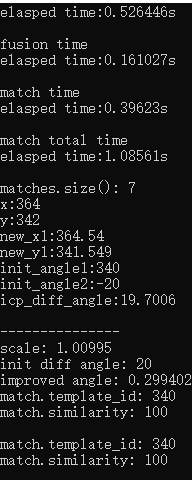 提升精度后的坐标:(364.54,341.549),对应Y轴坐标偏差还是比较大 测试实例图: ![Uploading image.png…]()
你好,你说的这句话:一般有偏移是因为物体在那个方向是平行的,不理解,能详细点吗?谢谢!补充一下测试图片: 
 这是模板点。
ipc之后的结果:  
好的,谢谢!我试试。我有个疑问就是你是从知道我开启了sim3呢?
你好!我做了测试。现把结果描述一下: 1 无sim3的submix程序代码配置: 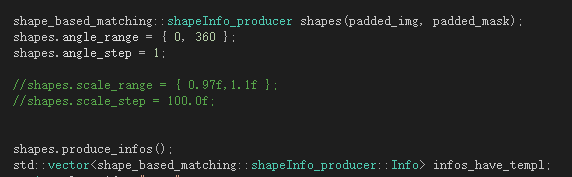  运行结果:  检测得到的亚像素模板中心点为(464.566-200,441.515-200)->(264.566,241.515),而实际模板中心点为(265,245),最大相差3个多像素。得分99. 运行结果图: 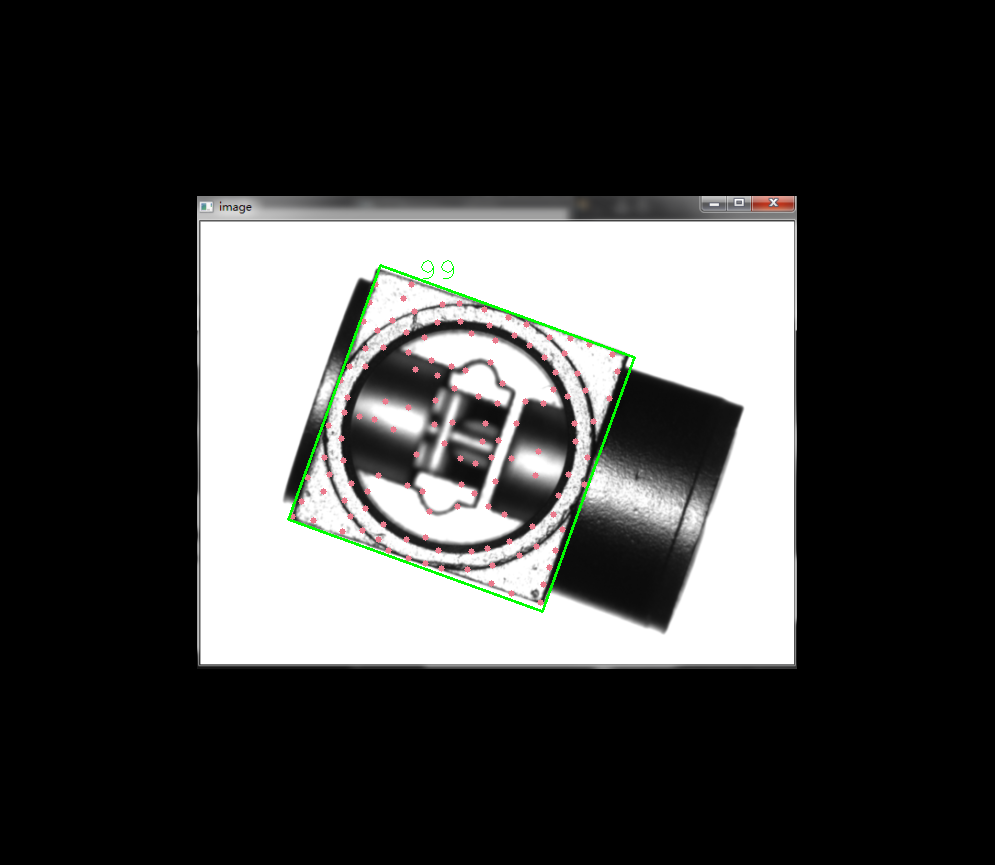 2sim3+submix程序代码配置 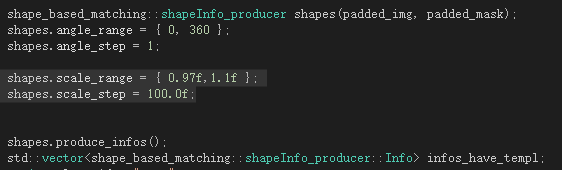  运行结果: 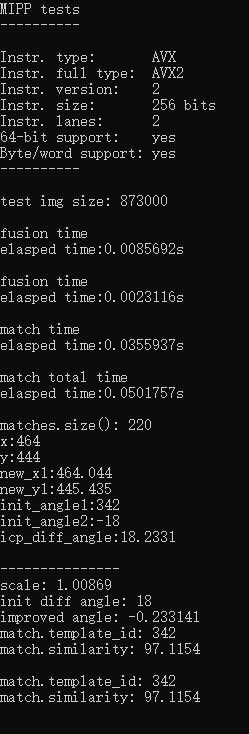 检测得到的亚像素模板中心点为(464.044-200,445.445-200)->(264.044,245.435),而实际模板中心点为(265,245),最大相差1个像素不到。得分97. 运行结果图:  测试结果总结:sim3+subpixel精确度比较好,但得分低点;subpixel精度度偏差较大,得分高点。请问这正常吗?
仔细看,会发现sim3更接近模板,如模板图:  检测图: 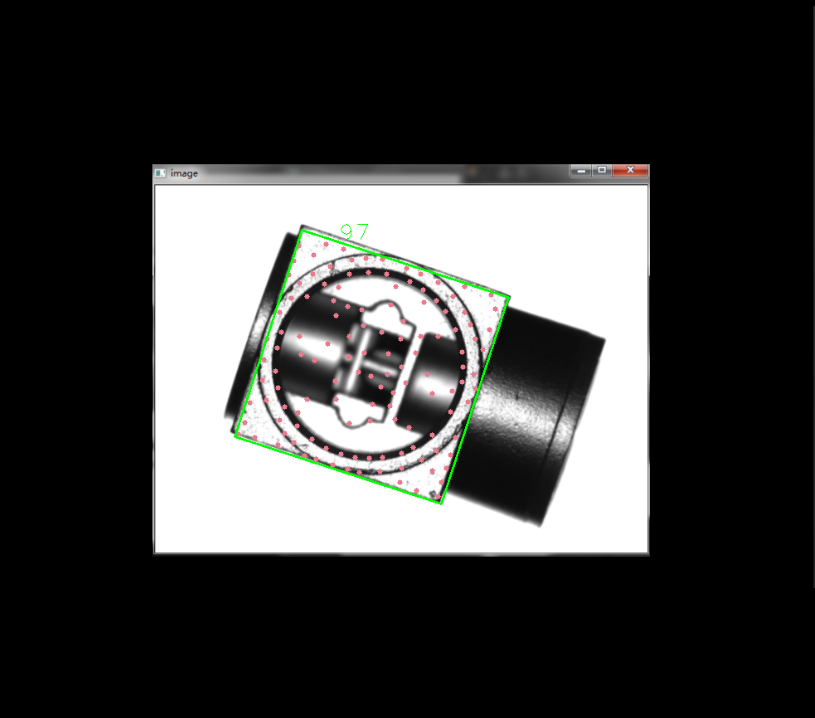
没有在理论上论证,只是凭观察对比看而已。
但是我测试下来sim3+subpixel比无sim3得到的中心点偏移效果要好。