模板中心点与匹配中心点有几个像素偏差
你好,meiqua!我运行实例shape_based_matching-fusion_by_hand中的angle_test,得到的结果如下:
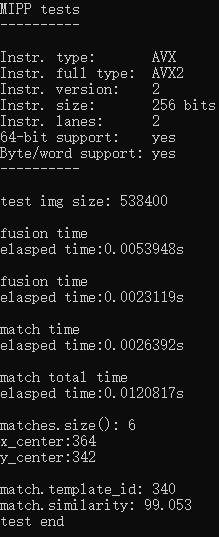 得到的匹配中心点坐标:(364-100,342-100),即就是(264,242).
而模板中心坐标为(130 + 270/2,110+270/2),即就是(265,245).
中心坐标有1至3个像素偏差,请问正常吗?谢谢。
得到的匹配中心点坐标:(364-100,342-100),即就是(264,242).
而模板中心坐标为(130 + 270/2,110+270/2),即就是(265,245).
中心坐标有1至3个像素偏差,请问正常吗?谢谢。
line2Dup::Detector detector(128, { 4,8 });对于这个设置,步长是不是就是2呢?我应用icp,得到的结果是:
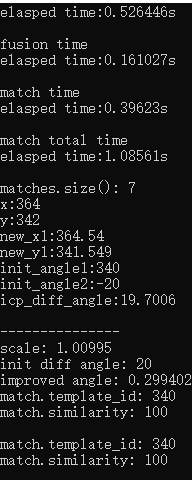 提升精度后的坐标:(364.54,341.549),对应Y轴坐标偏差还是比较大
测试实例图:
提升精度后的坐标:(364.54,341.549),对应Y轴坐标偏差还是比较大
测试实例图:

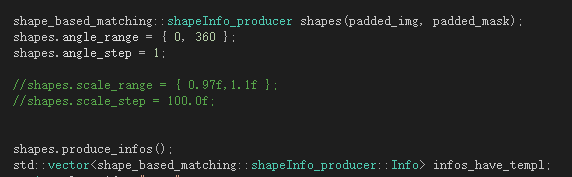
 这是模板点。
这是模板点。

首先非常感谢分享! 疑问:icp后,有对icp的结果的评分机制么?我通过摄像头实时取图匹配,发现有结果不稳定的现象:旋转角度 > 1° 还有就是利用icp进行亚像素匹配,有相关文档可以帮助理解吗? 谢谢!
你好!我做了测试。现把结果描述一下:
1 无sim3的submix程序代码配置:
 运行结果:
运行结果:
 检测得到的亚像素模板中心点为(464.566-200,441.515-200)->(264.566,241.515),而实际模板中心点为(265,245),最大相差3个多像素。得分99.
运行结果图:
检测得到的亚像素模板中心点为(464.566-200,441.515-200)->(264.566,241.515),而实际模板中心点为(265,245),最大相差3个多像素。得分99.
运行结果图:
 2sim3+submix程序代码配置
2sim3+submix程序代码配置
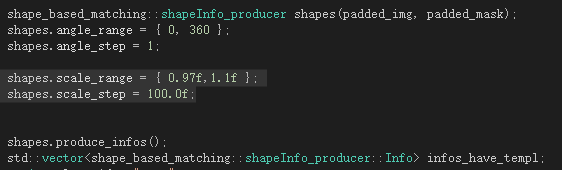
 运行结果:
运行结果:
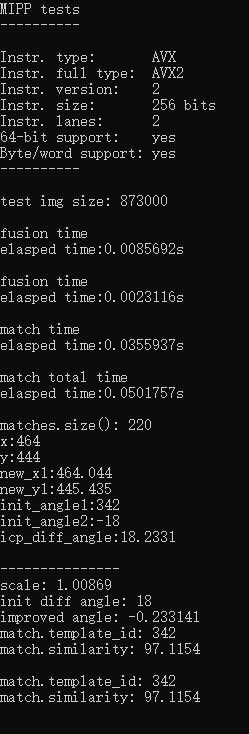 检测得到的亚像素模板中心点为(464.044-200,445.445-200)->(264.044,245.435),而实际模板中心点为(265,245),最大相差1个像素不到。得分97.
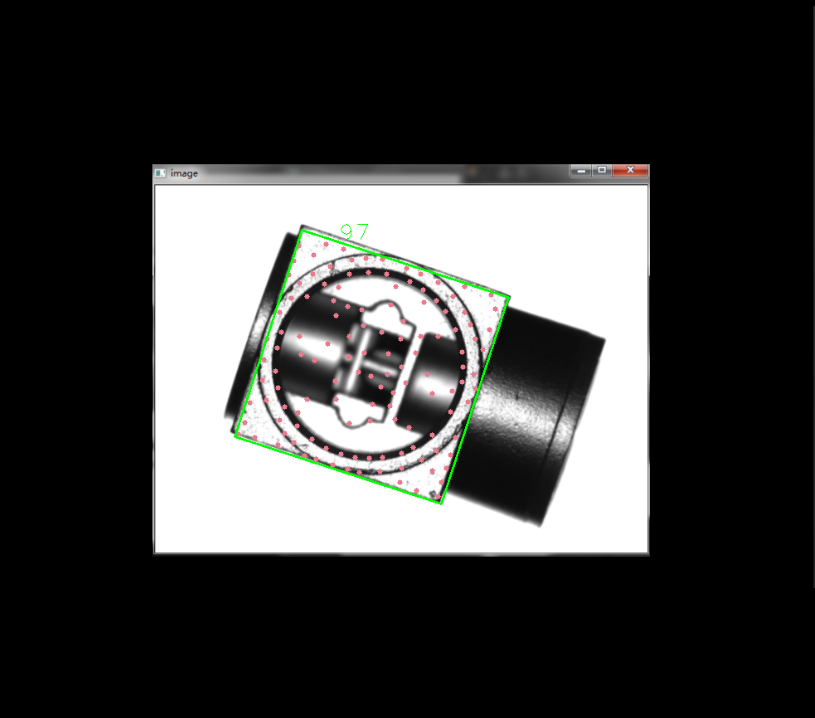
运行结果图:
检测得到的亚像素模板中心点为(464.044-200,445.445-200)->(264.044,245.435),而实际模板中心点为(265,245),最大相差1个像素不到。得分97.
运行结果图:
 测试结果总结:sim3+subpixel精确度比较好,但得分低点;subpixel精度度偏差较大,得分高点。请问这正常吗?
测试结果总结:sim3+subpixel精确度比较好,但得分低点;subpixel精度度偏差较大,得分高点。请问这正常吗?
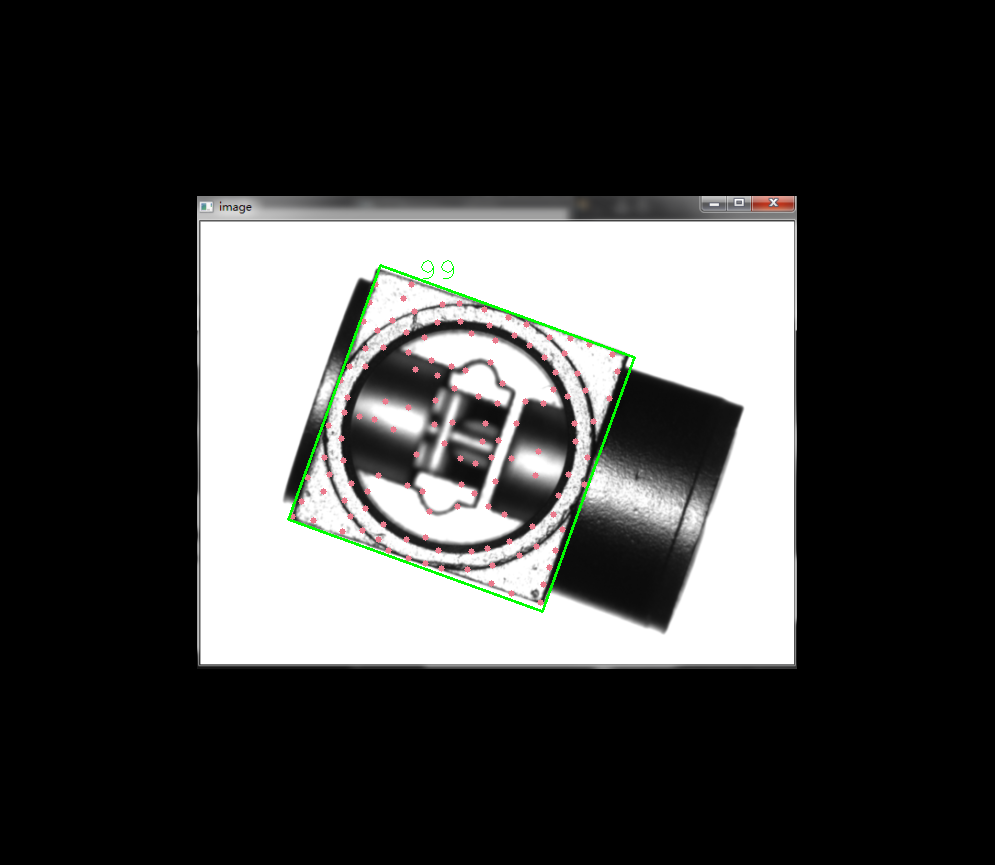
 检测图:
检测图:
训练模板取的矩形区域(130,110,270,270),那实际模板中心点就是(130+270/2,110+270/2)->(265,245)