wly2020-robot
wly2020-robot
在说说检测速度:上效果图 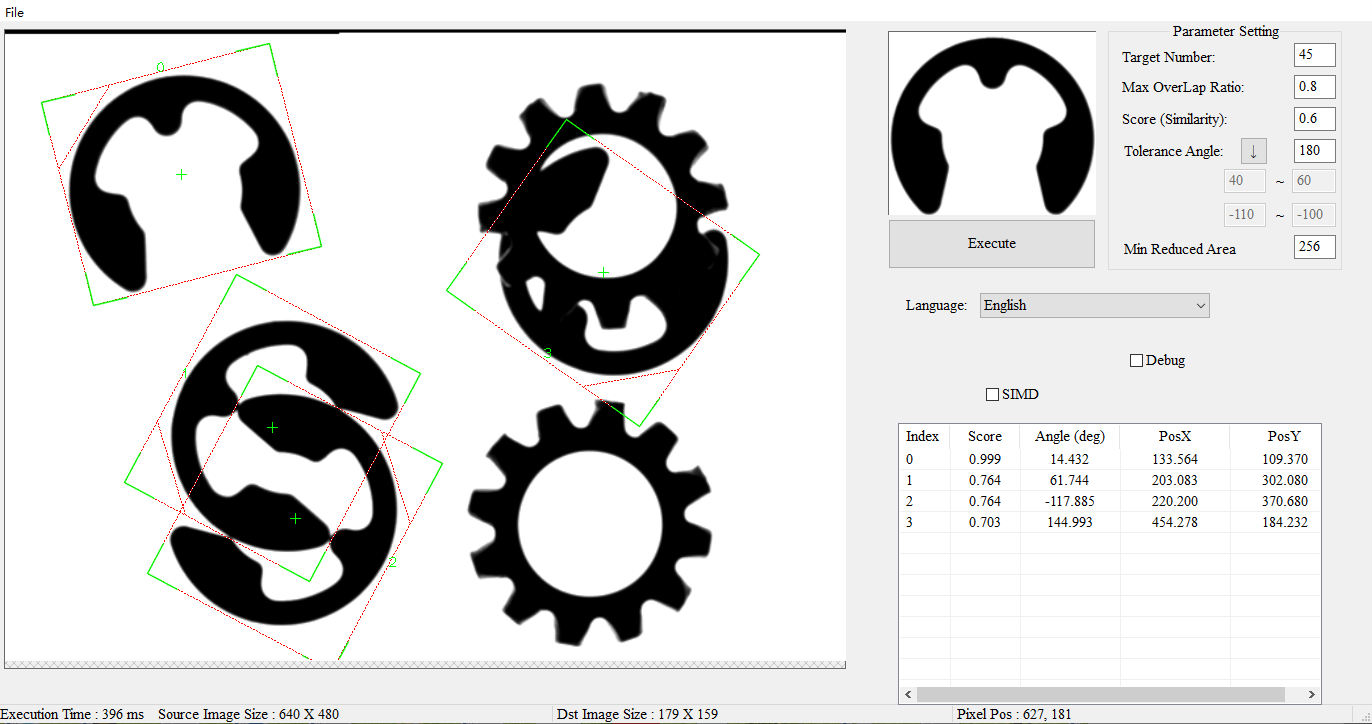 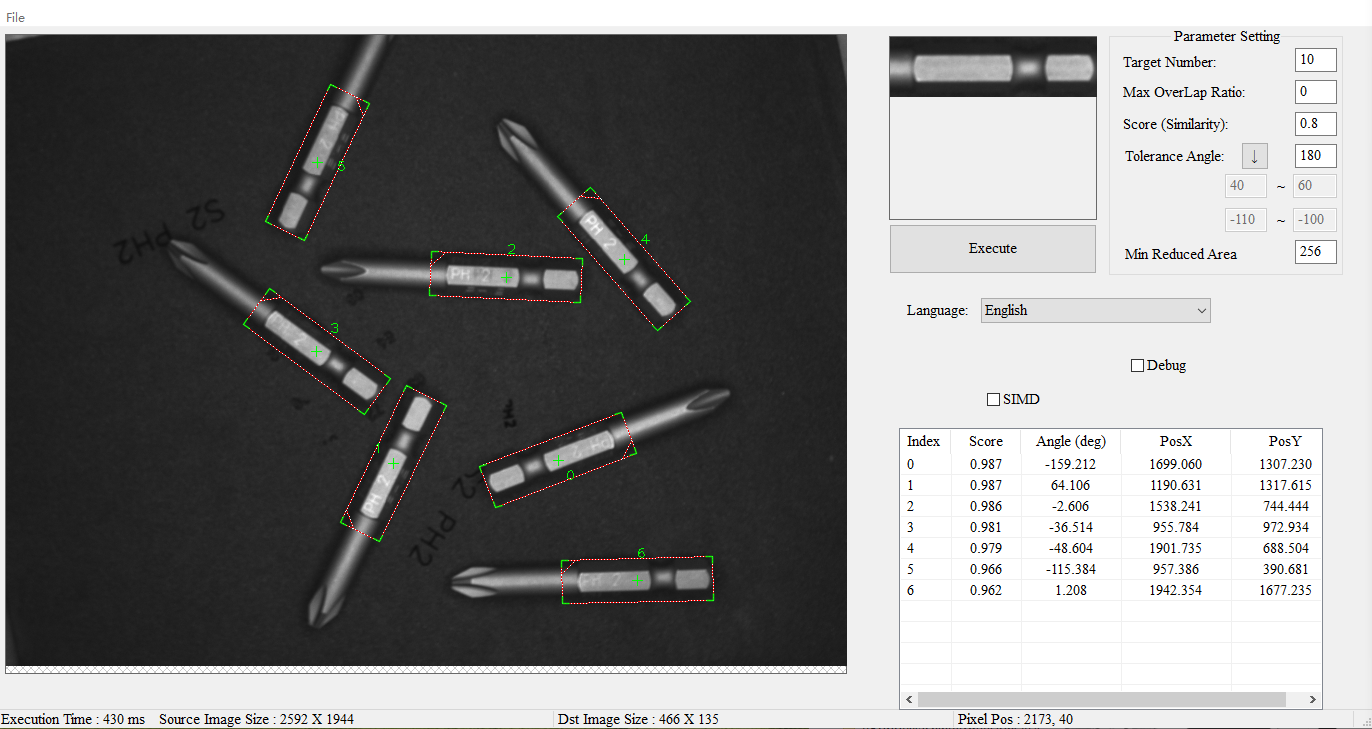 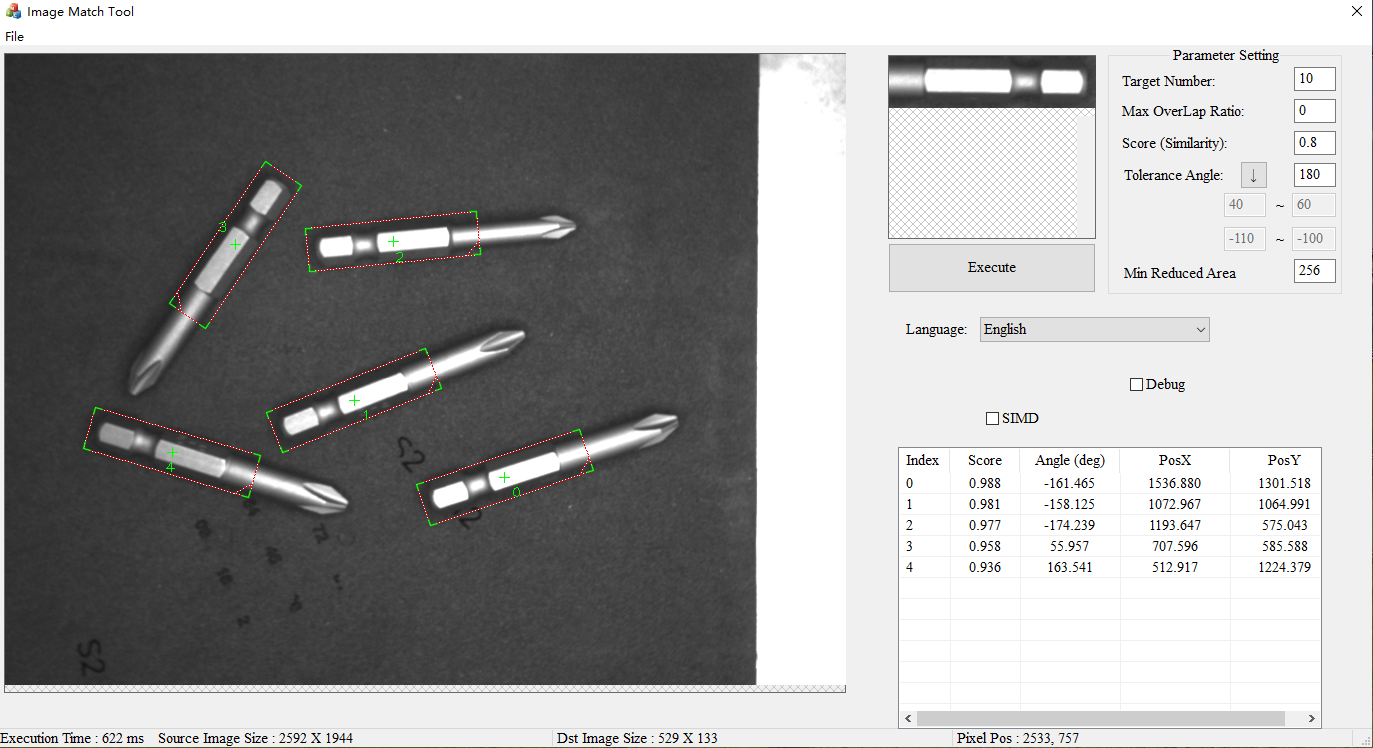 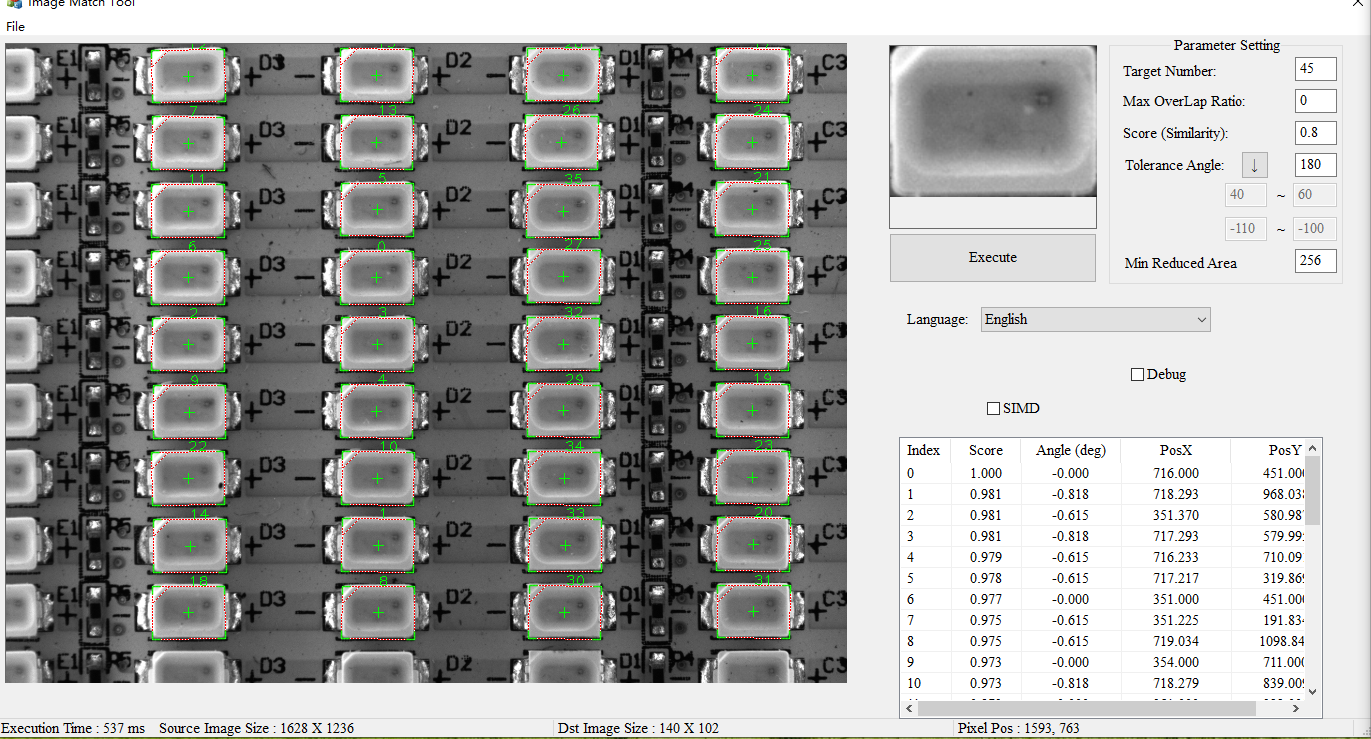 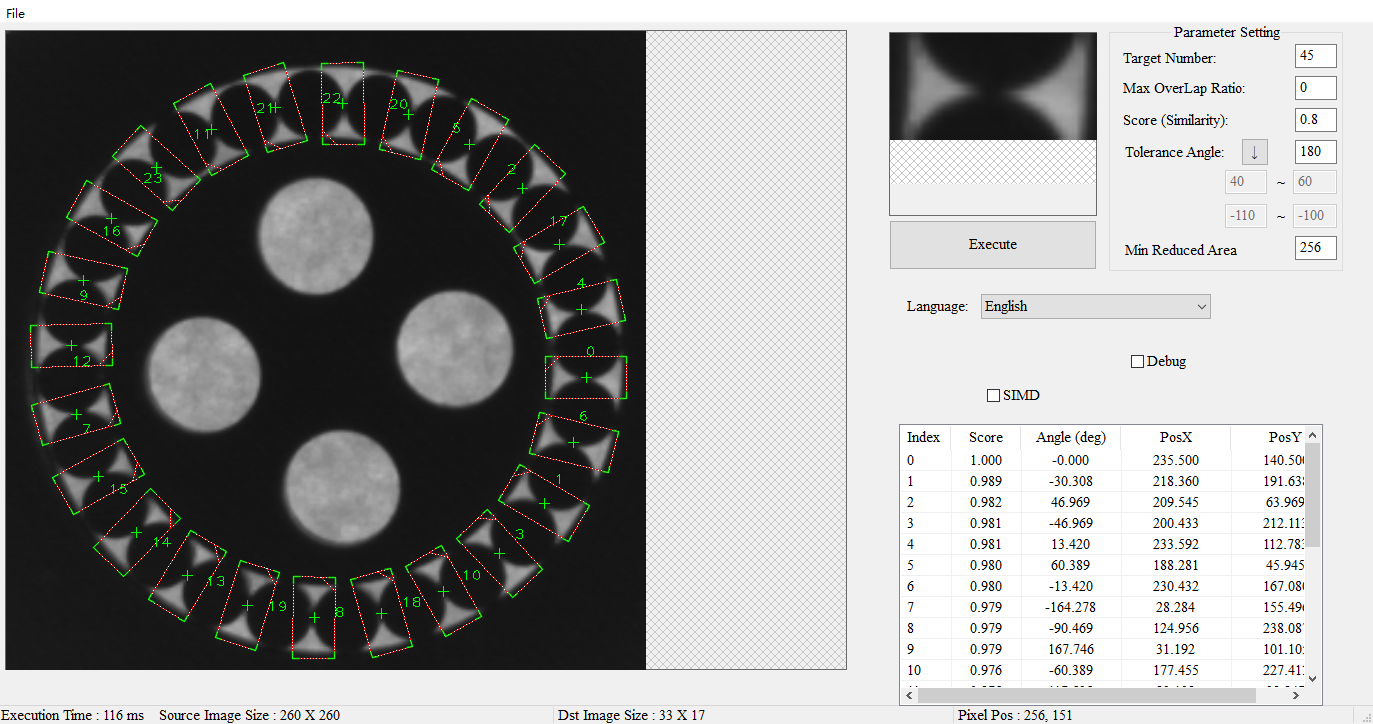 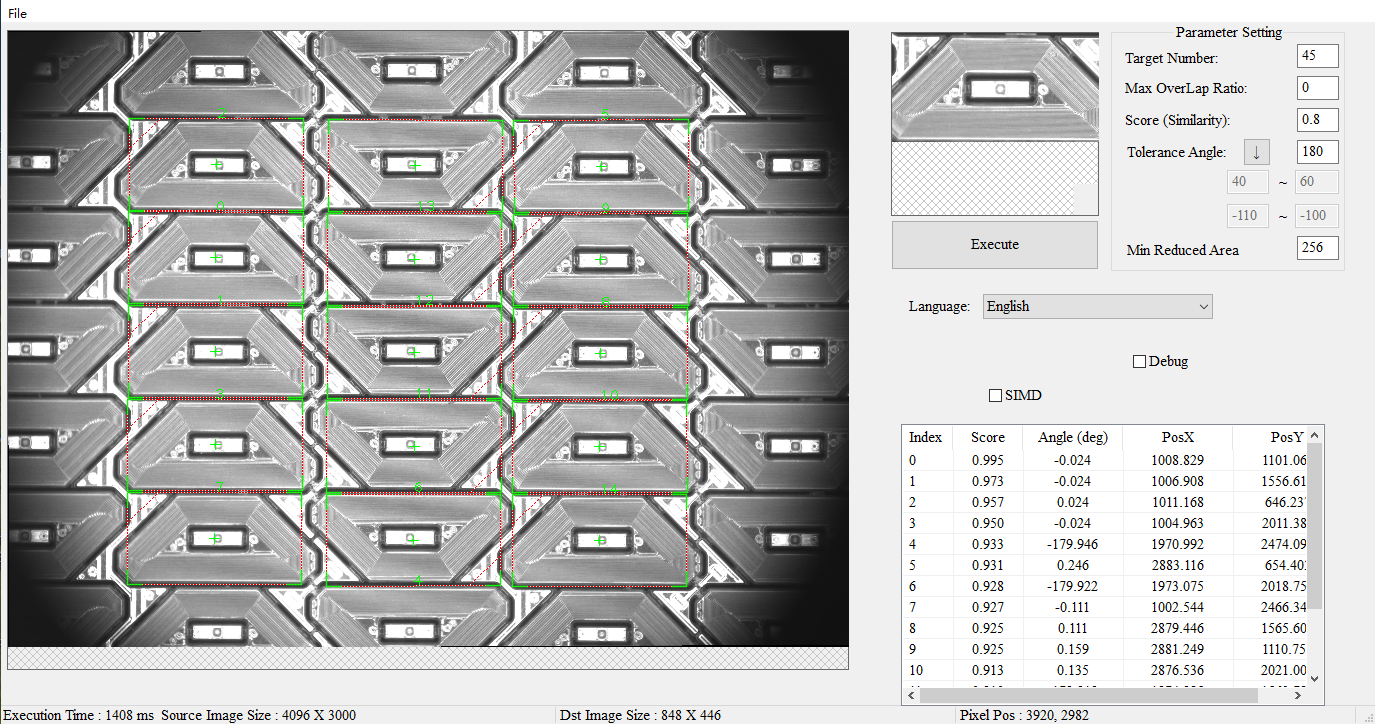 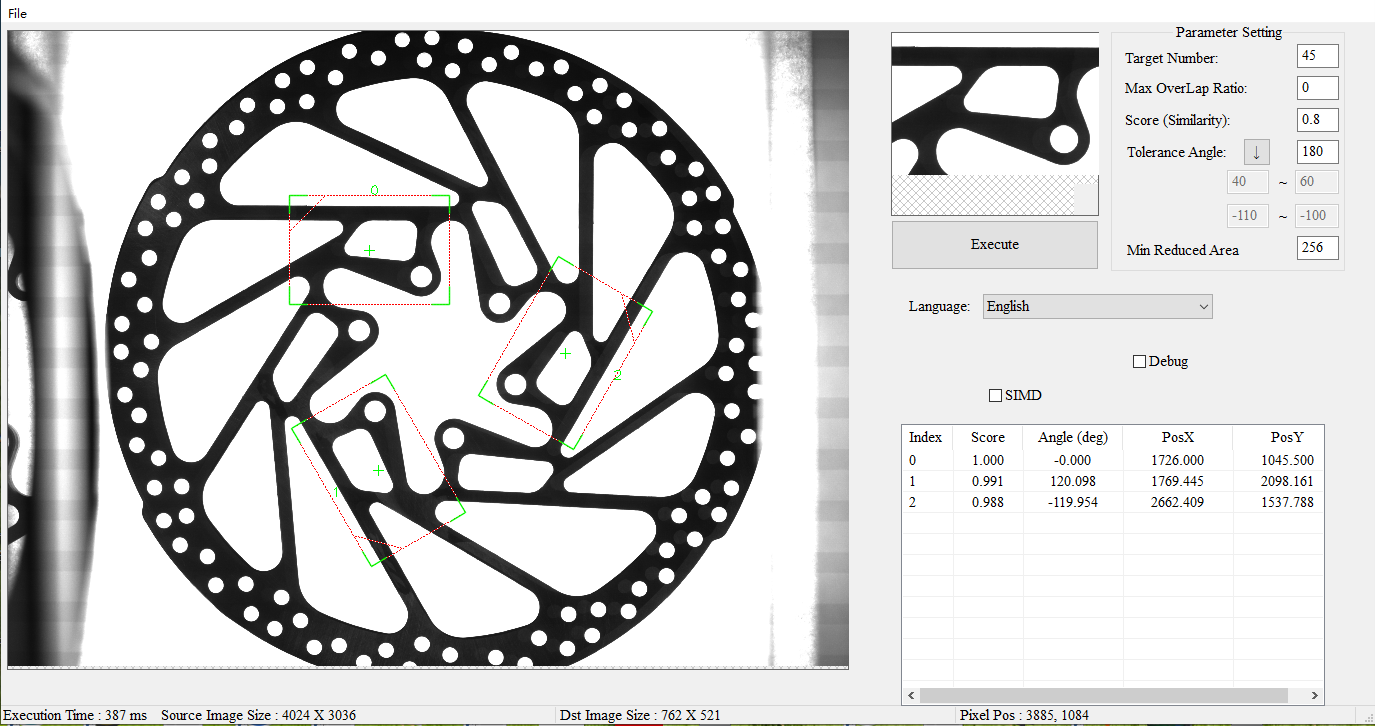 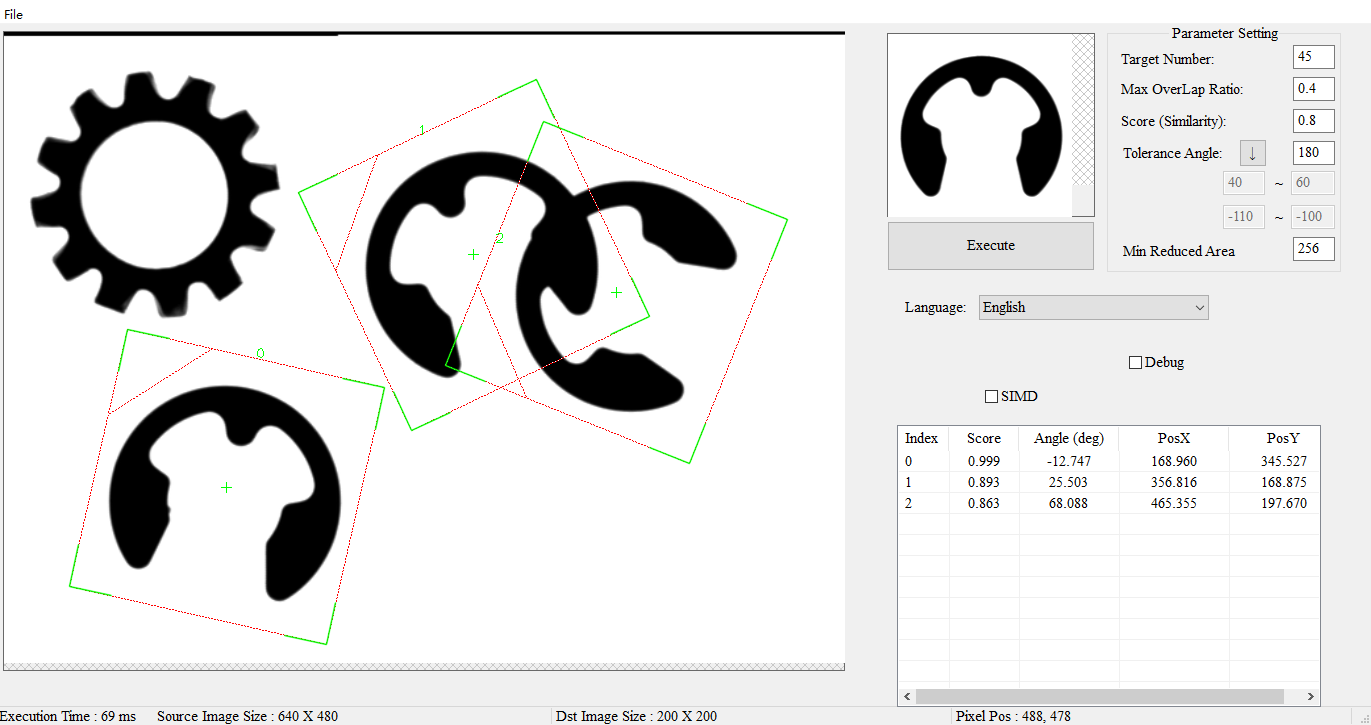
我的电脑主要配置如下图: 
检测速度会去到600多ms,像素级别也就是1000万多一点,还是慢了点。
我实际用的arm嵌入式板,相比电脑配置检测速度就要慢3-4倍。
实际上工业上检测对检测速度和精度要求是高的。你这个算法就测试来看,与博主大佬的算法差距还是有的。也有可能我有些方面没有考虑到,或者没有优化到,请指教?谢谢。
嗯,38度那张图,那实际检测出来的角度38.454,偏差0.454度;0度那张图实际检测出来的角度是-0.761度,偏差0.761度;实际工业上定位检测,角度偏差在0.1度左右,甚至更小;能有优化的空间吗?
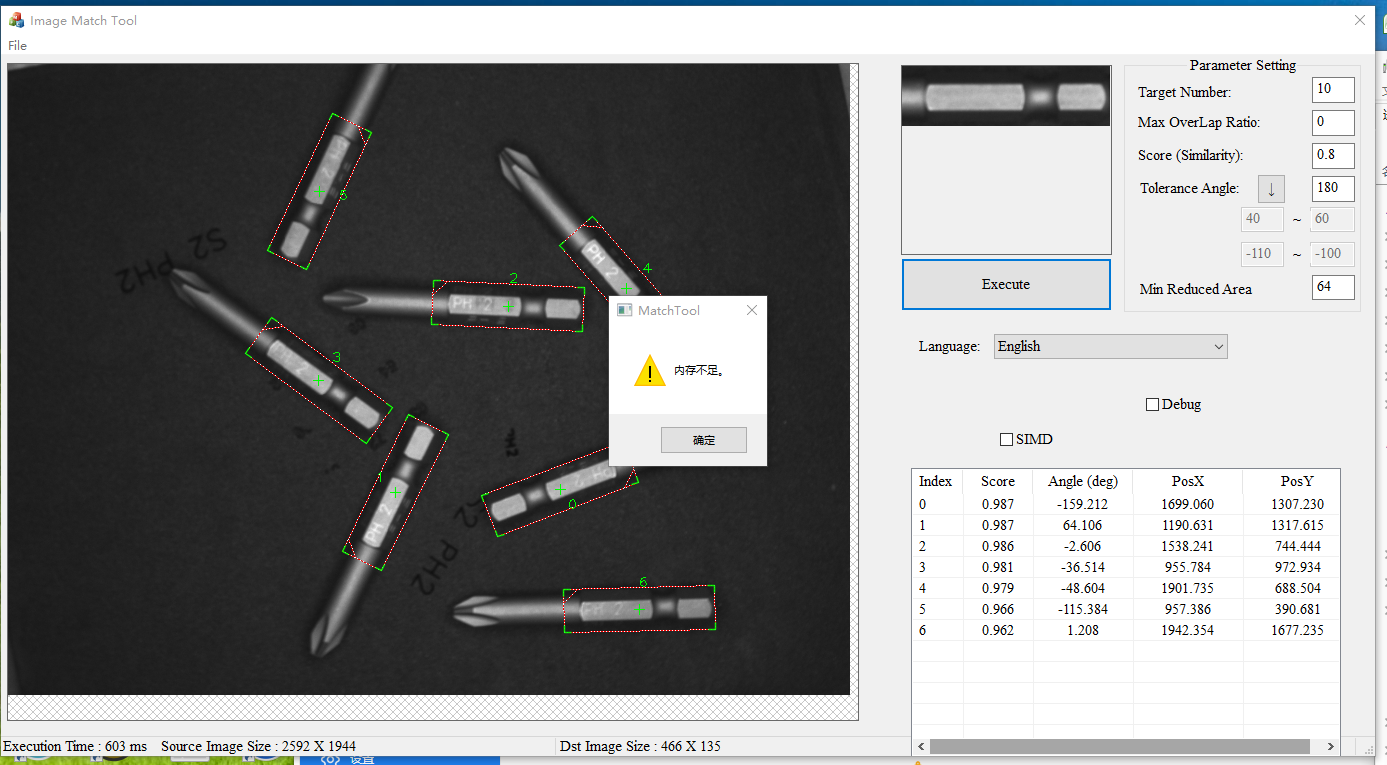
把Min Reduced Area改成64,内存使用直接飙到6个G,直接卡死。
需要很大内存吗?
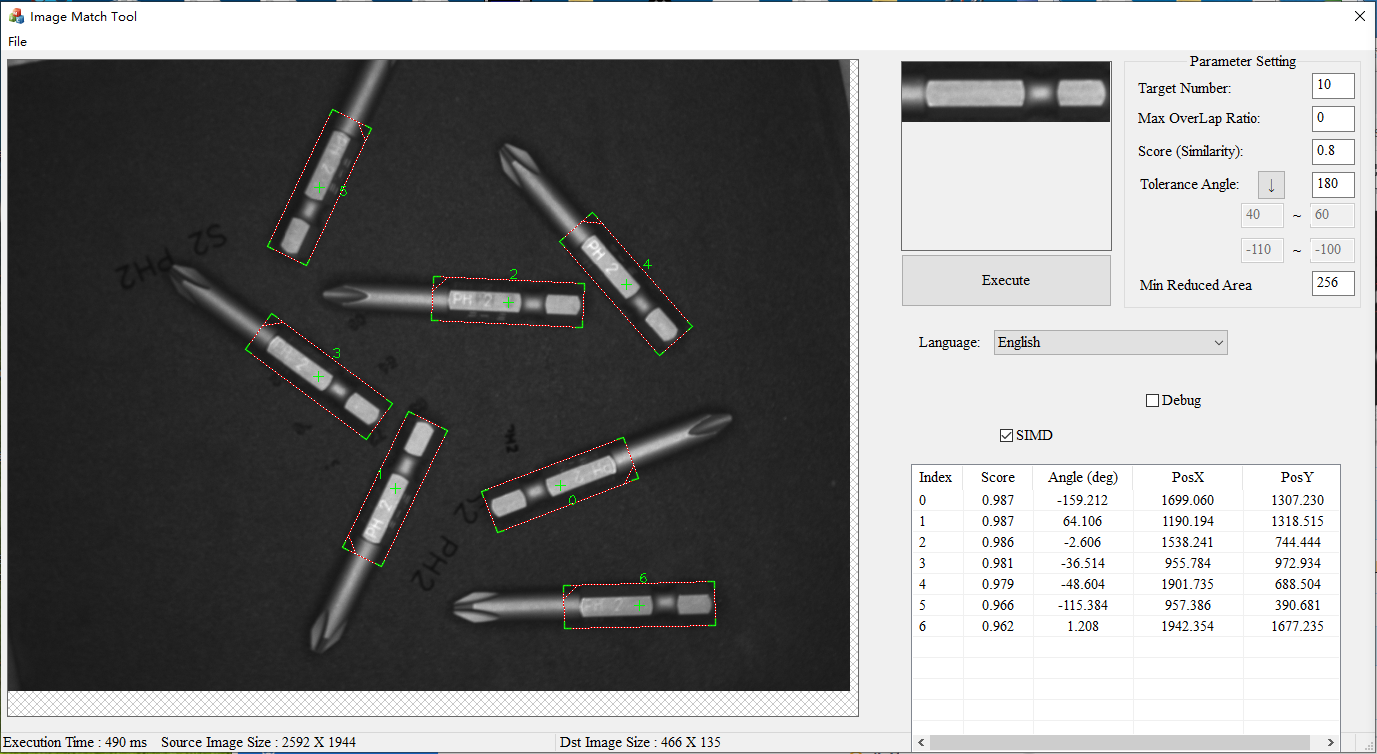 单勾选SIMD,速度提升不大。