wly2020-robot
wly2020-robot
你好,我在细致看论文时,我的理解下来是这样的:论文讲述linemod和line2D检测效果是比较好的,但是line2D要比linemod在二维空间实用性强,虽然误检率高一些,主要是实时性强(速度快)。对比论文,我有几个问题:1:算法实现代码是否基于line2d原理?2:算法或论文里面有讲到,算法具有抗遮挡,混乱,非线性光照等影响,但是实际测试下来,算法对目标检测过程中,对非线性光照和模糊图片中目标检测还是敏感的?3:论文里面的测试效果,都是通过角度和size分割出2000个以上模板进行训练,算法demo里面的是没有这么多,模板多,只是训练时间长,是不是会得到更高的目标检测精度高呢?期待你的回答,谢谢。
应该是版本不对呢
我跟踪了代码,matchClass里面一个for循环有几处都会引发程序崩溃。具体哪行代码问题,还没有跟踪到。
我明天在调试一下,尽量把问题点定位出来。
你好,跑了一下,效果还可以;那么请问检测速度和精度怎么样?谢谢
测试了一下,检测速度有点难达到工业要求。精度尚不知。
你好,测试图目前全部来自你的实例图。
首先说一下角度检测,采用你的测试用例图;比如实际上是0度,用你的算法检测出来是-0.761;实际上是45度,实际检测出来的是38.454;检测效果图如下: 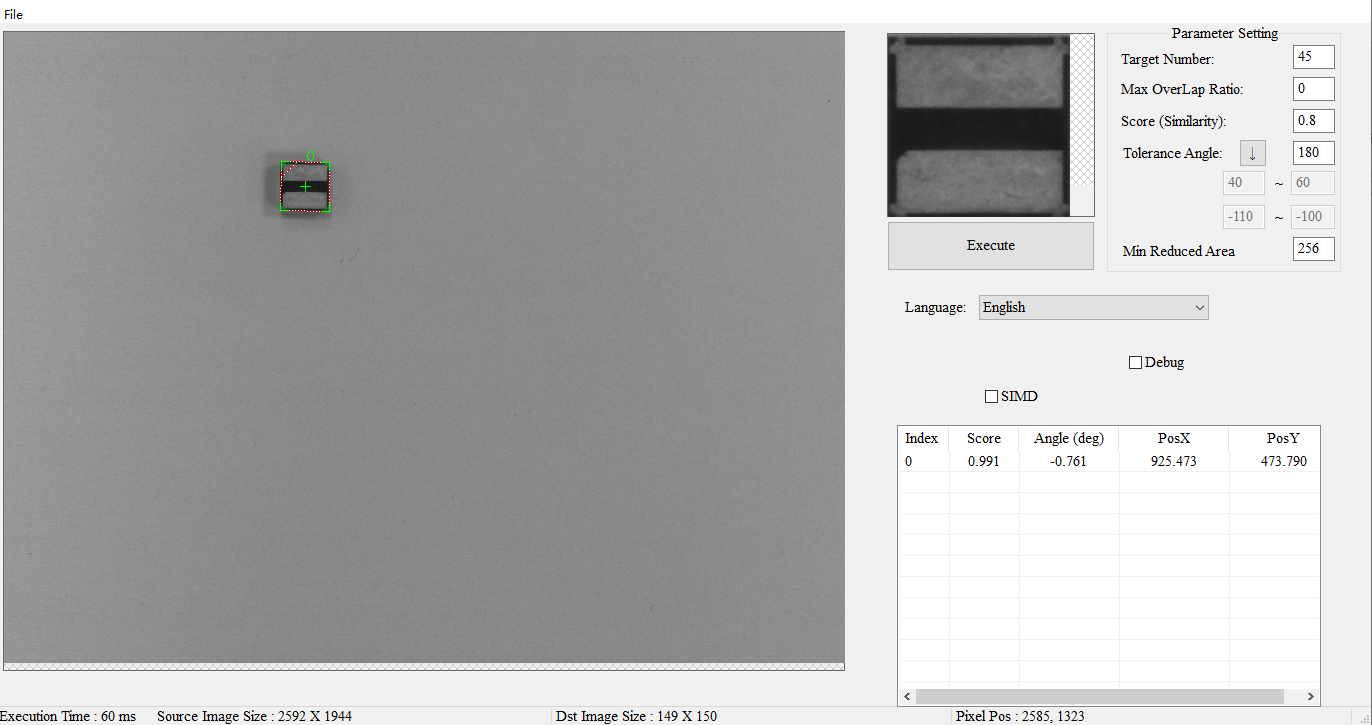
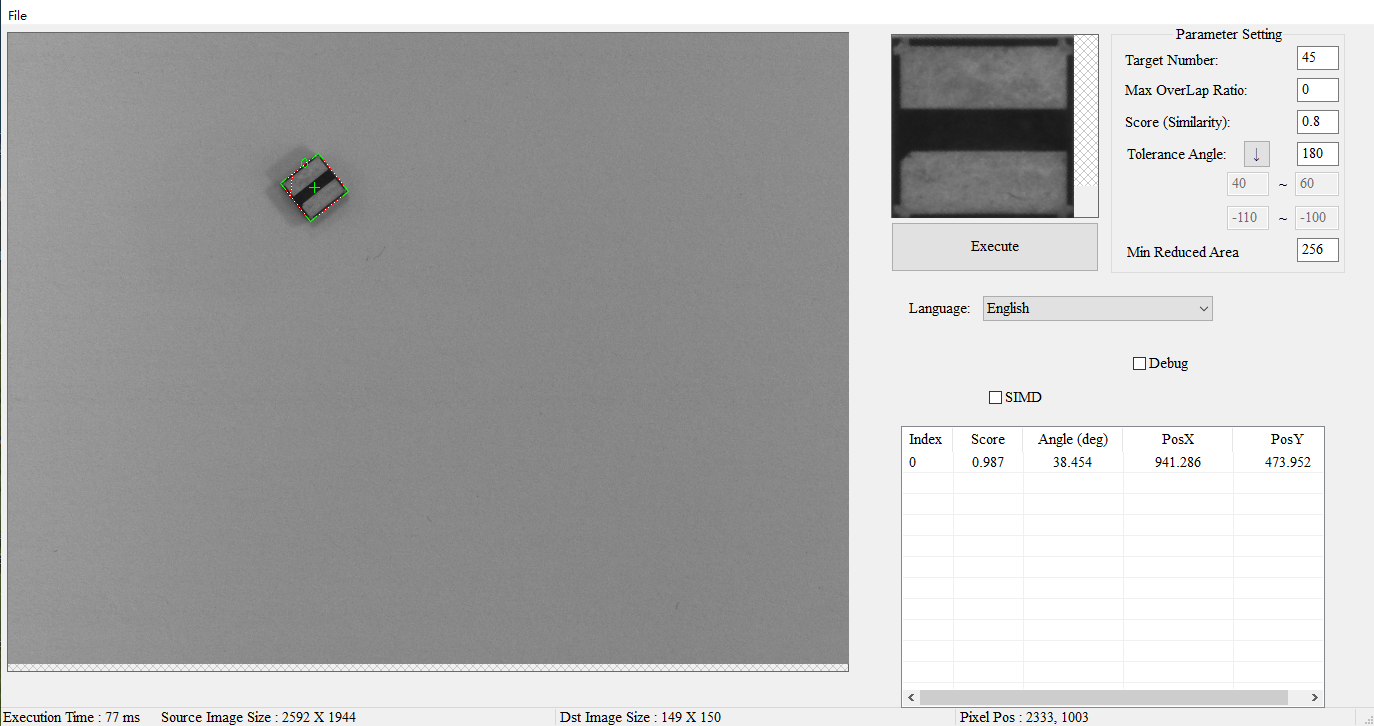
偏差很大,是不是我哪里操作不对?