wly2020-robot
wly2020-robot
你好,首先对你的解答很是感谢;已经把star给到你了。
 能否给出在Min Reduced Area为64时,检测上图的耗时结果呢?把电脑配置也麻烦说一下,谢谢!
同时能否给出算法的检测角度偏差范围呢?就像meiqua一样给出具体的精度数据,谢谢。
是的,我的配置要比你的低一点,检测下来大概190ms左右,还是觉得慢,工业上的工控电脑性能都比较弱,检测速度难以满足要求,有没有优化空间?效果图如下 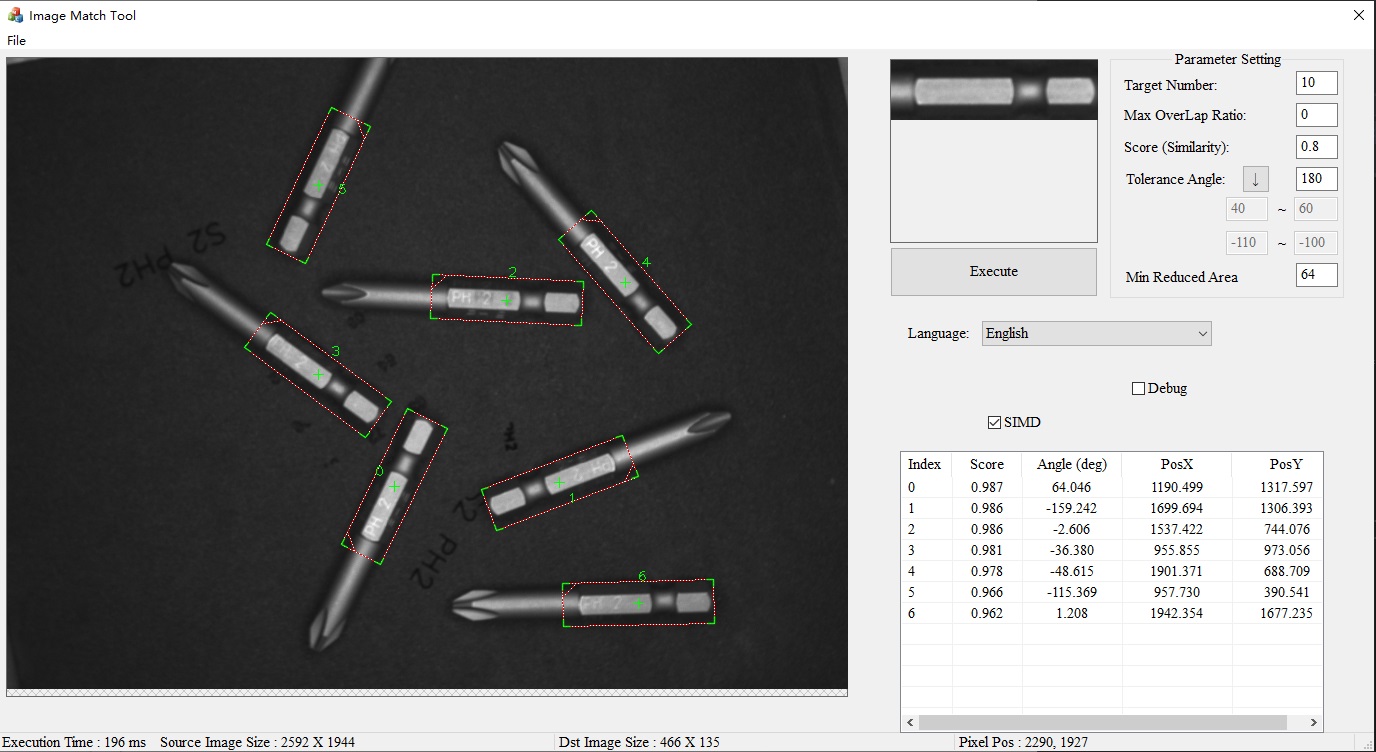
对于目标的角度检测精度是>0.2吗?我在arm的6核心处理器上跑出来的效果去到1340ms左右,如果能跑出200-300ms基本上就满足速度要求了。如果在ubuntu系统上跑,有没有相应的版本或者是替换SIMD的版本参考呢?谢谢
但是关于subpixel 的精度计算cuda_icp::RegistrationResult result = cuda_icp::ICP2D_Point2Plane_cpu(model_pcd, scene);和sim3的 deal with scale error cuda_icp::RegistrationResult result = cuda_icp::sim3::ICP2D_Point2Plane_cpu(model_pcd, scene);是不是要用到GPU处理器来计算?因为我在没有 navidia GPU处理器电脑跑算法,处理时间会明显增加。
能否把算法运行速率优化到50ms以内?我现在电脑上装的  跑下来,速率在70ms左右。
检测时间
fusion和icp柔合版本
我说的是fusion和icp柔合版本定位检测目标耗费时间:70ms左右。当然这是在台式电脑上基于win10系统跑的。