FAST_LIO
 FAST_LIO copied to clipboard
FAST_LIO copied to clipboard
A computationally efficient and robust LiDAR-inertial odometry (LIO) package

你好,感谢你们开源这么好的作品。 我分别使用镭神c16和速腾聚创c16这两种雷达分别配合realsense d455 相机集成的IMU和LPMS-IG1 RS232 IMU 尝试建图,但是出现了如下图的报错 请教一下可能是什么问题。谢谢!! 错误截图如下:  ubuntu的版本如下:  尝试过使用 速腾聚创的C16的激光雷达  和 镭神C16激光雷达 外接的IMU尝试使用过 intel的 realsense d455 集成的imu 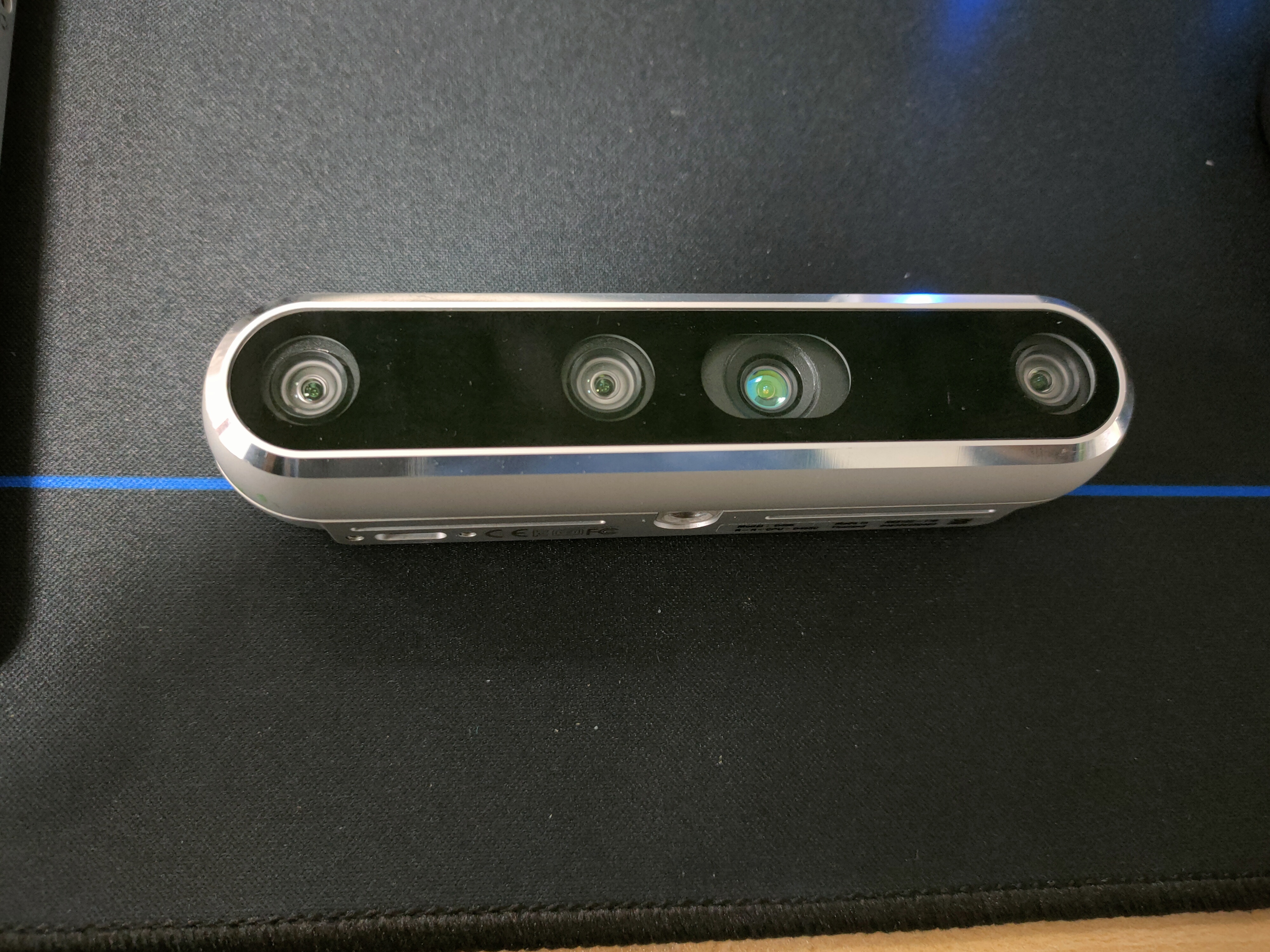 和 LPMS-IG1 RS232 两种:...
我用MID 70传感器和外置imu试验了该工程,在机器人原地旋转的时候,里程计大概率会“飞”,但log基本没有异常提示,如果不旋转,只是控制机器人来回前后做往复运动,则基本都是正常的。请问该问题如果可以改善?
大佬们好,我是一个刚接触slam、里程计等内容的小白,自己折腾不下去了,前来求助。 我按照提供的GitHub内容进行了Rosbag example的测试,rviz中的显示一切正常,跑不同的bag包有不同的rviz显示结果。下面这张图就是 `Avia测试`的rviz中的结果,使用的`outdoor_Mainbuilding_10hz_2020-12-24-16-38-00.bag`。 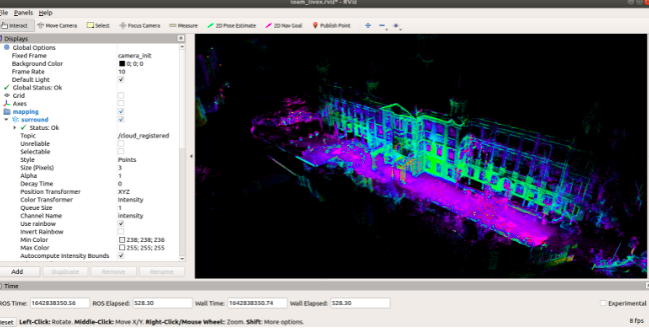 这应该可以说明,我的一系列环境配置都没问题。但是,我在rosbag play xxx 时,观察了里程计的数据输出(/Odometry话题),发现输出中只有 pose数据,而twist数据全为0。我也测试了其他的bag文件,也进行了 `Velodyne`的bag文件测试。尽管这些测试都一切正常(rviz中看着挺正常的),但是其/Odometry输出数据中,**所有的twist数据全为零**。这是为什么呢?twist下不应该有数据吗? 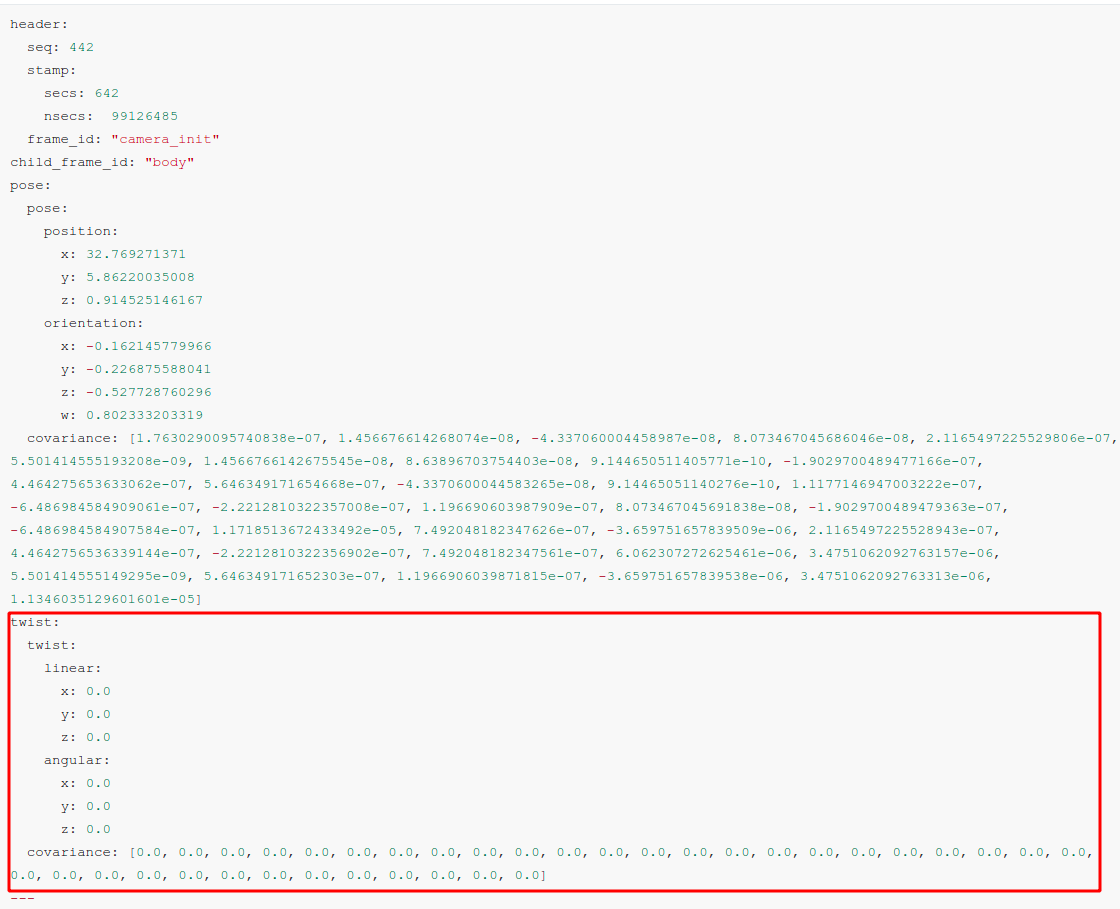 可以参考下面这个gif动画(有些模糊,见谅)。  您知道这是为什么吗?我也并未对clone下来的源码进行改动过。 (下面是自己尝试寻找问题原因的插曲...) 我也读了fastlio的两篇论文,把fastlio的大致流程弄明白了(应该...)。我发现两篇论文给的系统概览图中,都是`Converged?`都指向了`Odometry`,但是并未在论文中看见相关的描述(也可能是我没看到...)。然后,我尝试又从源代码中找找Odometry的输出,结果更是看不明白..... 不得已之下,只能向您请教一下了。 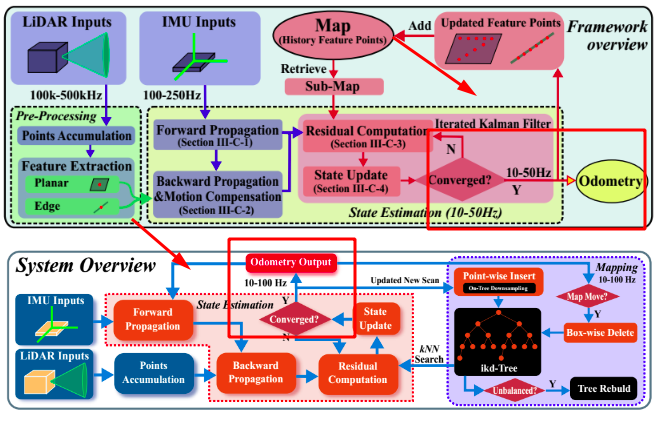
我采用的是***avia***传感器,在测试数据时出现了loop back的报错,同时建图系统停止。请问这个问题应该怎么解决? 下面是相关截图: ![Uploading issue1.jpg…]() ![Uploading issue2.jpg…]() ![Uploading issue3.jpg…]() ![Uploading issue4.jpg…]()
Hi all, I am curious about the scan_line and blind parameters in the config file. What are these parameters for? And what values should I set them to? Thank you!
Hi, I have ported FAST_LIO to ros2. Please don't merge directly, keep these in a new branch. Tested on x86 (Ubuntu 20.04 + ROS Foxy) and Jetson (Ubuntu 18.04 +...
Hi, just wanted to double check: Am I correct in the assumptions that the frames used by FAST_LIO of "body" and "camera_init" correspond to the ROS REP 105 frames "base_link"...