FAST_LIO
 FAST_LIO copied to clipboard
FAST_LIO copied to clipboard
机器人原地旋转时,里程计“飞”了
我用MID 70传感器和外置imu试验了该工程,在机器人原地旋转的时候,里程计大概率会“飞”,但log基本没有异常提示,如果不旋转,只是控制机器人来回前后做往复运动,则基本都是正常的。请问该问题如果可以改善?
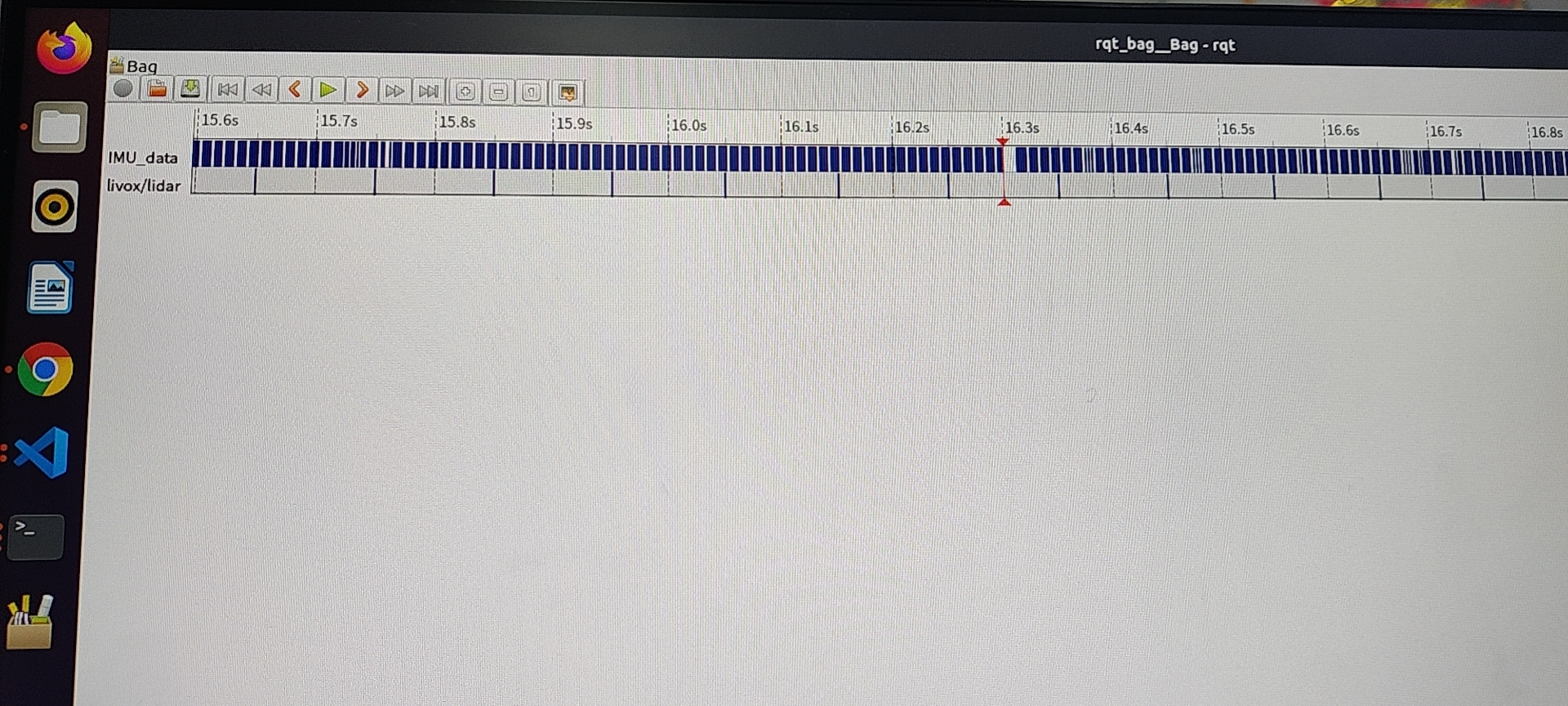 你好,我录制了约一分钟的bag,查看时候发现有一段如上图所示的imu数据“空白”,不太确认是丢帧还是阻塞了
你好,我录制了约一分钟的bag,查看时候发现有一段如上图所示的imu数据“空白”,不太确认是丢帧还是阻塞了
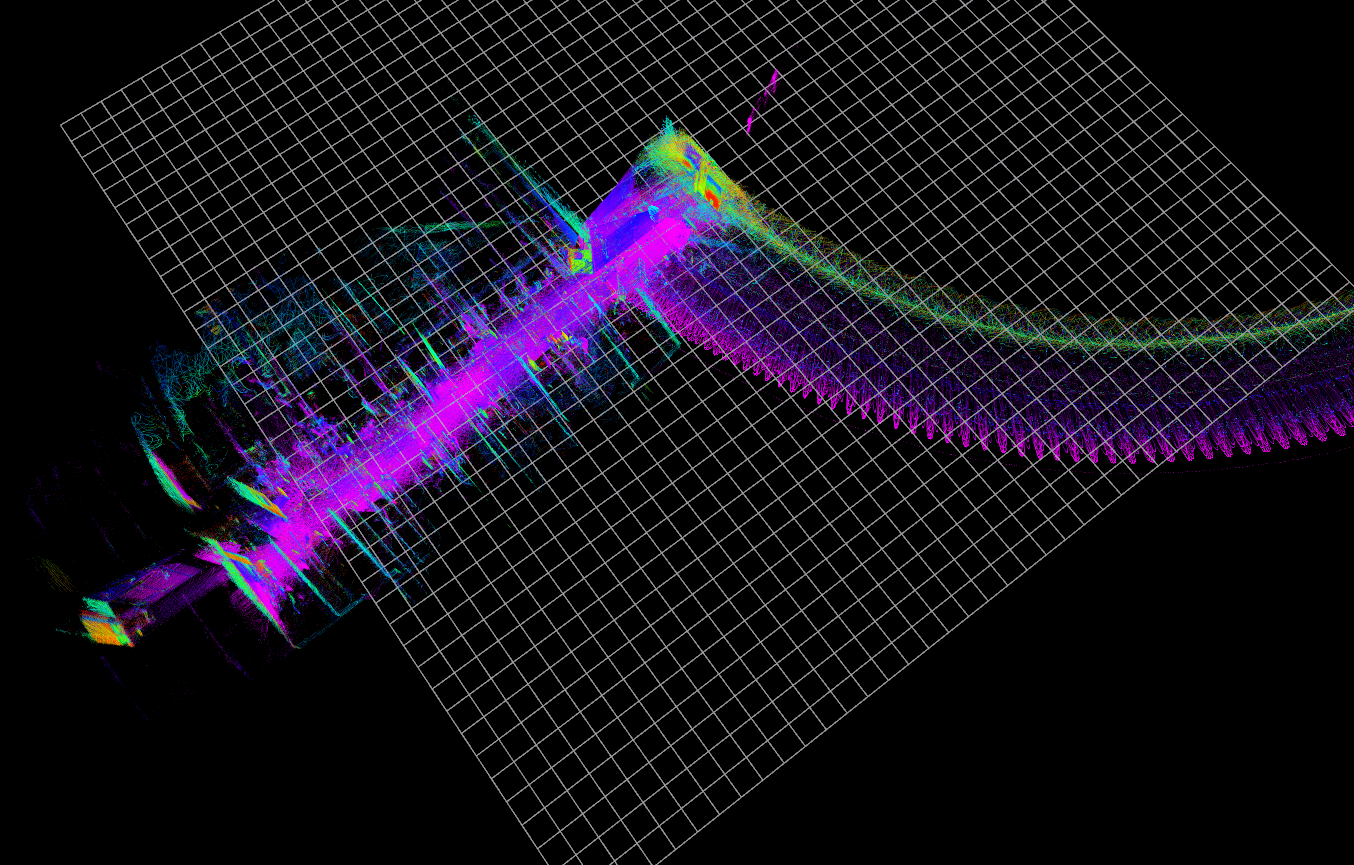
发现了一种比较容易浮现的方法,将雷达对准一面墙壁拍摄,当看到里程计开始“抖动”比较厉害时候,再把雷达转回来,朝向正常的场景,里程计大概率无法再次稳定,而是继续震荡变大,然后彻底“飞”了
FastLIO2的点-面残差机制容易导致它发散。 如果中间一个点云由于某种原因,没能得到准确pose,那么放到local map中,会导致local map中出现错误位置的点云。 而下一帧在寻找最近邻时,由于五个最近邻点的机制,容易导致最近邻的平面中,一部分落在正确的点云上,一部分落在错误的点云上,进而导致本帧也出现发散。 所以这样一个系统容易由于一帧错位导致后续的帧都发生错位,产生上图的情况。
添加关键帧机制或者给历史点云增加更高的权重可以改善这个问题。
@gaoxiang12 你的这种策略我们之前考虑过,在低速场景下也许是能用的,但是在高速场景下(如无人机高速飞行),你不得不相信前一帧刚刚加入地图的点云。 事实上,我们组也有考虑过怎么解决某一帧点云错误pose导致的后续问题,如:
- 加入雷达滑动窗口: Liu, Zheng, and Fu Zhang. "Balm: Bundle adjustment for lidar mapping."
- 是用概率地图的的方案: Yuan, Chongjian, et al. "Efficient and Probabilistic Adaptive Voxel Mapping for Accurate Online 3D SLAM."
- 加入更多视觉观测,如R2LIVE, R3LIVE系列
- 其他若干在延方案
FastLIO2的点-面残差机制容易导致它发散。 如果中间一个点云由于某种原因,没能得到准确pose,那么放到local map中,会导致local map中出现错误位置的点云。 而下一帧在寻找最近邻时,由于五个最近邻点的机制,容易导致最近邻的平面中,一部分落在正确的点云上,一部分落在错误的点云上,进而导致本帧也出现发散。 所以这样一个系统容易由于一帧错位导致后续的帧都发生错位,产生上图的情况。
添加关键帧机制或者给历史点云增加更高的权重可以改善这个问题。
@gaoxiang12 这个issue里面楼主提到的,“面对一个大墙抖动发散”,原因是:雷达退化方向的位移不可观,而可观性是滤波器收敛的必要条件。长时间的不可观(退化)必定会带来ekf的发散。工程上可以添加退化检测来防止发散,但是也仅仅是防止发散,退化方向的位移理论上就解不出来。
point plane 测量模型,本身确实不是最精准的模型。这个的改进可以参考楼上林博提到的文献2。
假设,我只是假设哈, 请问是否在开阔地方使用?我遇到了类似的问题, 我们使用的 avia , 在室内我的角向量只要偏转一点点,立刻就飞到姥姥家 但是我在室外林地等开阔地方使用,就都没有问题
2. Efficient and Probabilistic Adaptive Voxel Mapping for Accurate Online 3D SLAM
FastLIO2的点-面残差机制容易导致它发散。 如果中间一个点云由于某种原因,没能得到准确pose,那么放到local map中,会导致local map中出现错误位置的点云。 而下一帧在寻找最近邻时,由于五个最近邻点的机制,容易导致最近邻的平面中,一部分落在正确的点云上,一部分落在错误的点云上,进而导致本帧也出现发散。 所以这样一个系统容易由于一帧错位导致后续的帧都发生错位,产生上图的情况。 添加关键帧机制或者给历史点云增加更高的权重可以改善这个问题。
@gaoxiang12 这个issue里面楼主提到的,“面对一个大墙抖动发散”,原因是:雷达退化方向的位移不可观,而可观性是滤波器收敛的必要条件。长时间的不可观(退化)必定会带来ekf的发散。工程上可以添加退化检测来防止发散,但是也仅仅是防止发散,退化方向的位移理论上就解不出来。
point plane 测量模型,本身确实不是最精准的模型。这个的改进可以参考楼上林博提到的文献2。
你好,请问下目前的FAST LIO2中已经采用了文献2中的体素地图的表示方法吗?
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.