FAST_LIO
 FAST_LIO copied to clipboard
FAST_LIO copied to clipboard
realsense d455 相机集成的IMU和LPMS-IG1 RS232 IMU 报错terminate called after throwing an instance of 'std::runtime_error' what(): Time is out of dual 32-bit range
你好,感谢你们开源这么好的作品。 我分别使用镭神c16和速腾聚创c16这两种雷达分别配合realsense d455 相机集成的IMU和LPMS-IG1 RS232 IMU 尝试建图,但是出现了如下图的报错 请教一下可能是什么问题。谢谢!! 错误截图如下:

ubuntu的版本如下:
 尝试过使用
速腾聚创的C16的激光雷达
尝试过使用
速腾聚创的C16的激光雷达
 和
镭神C16激光雷达
和
镭神C16激光雷达
外接的IMU尝试使用过
intel的
realsense d455 集成的imu
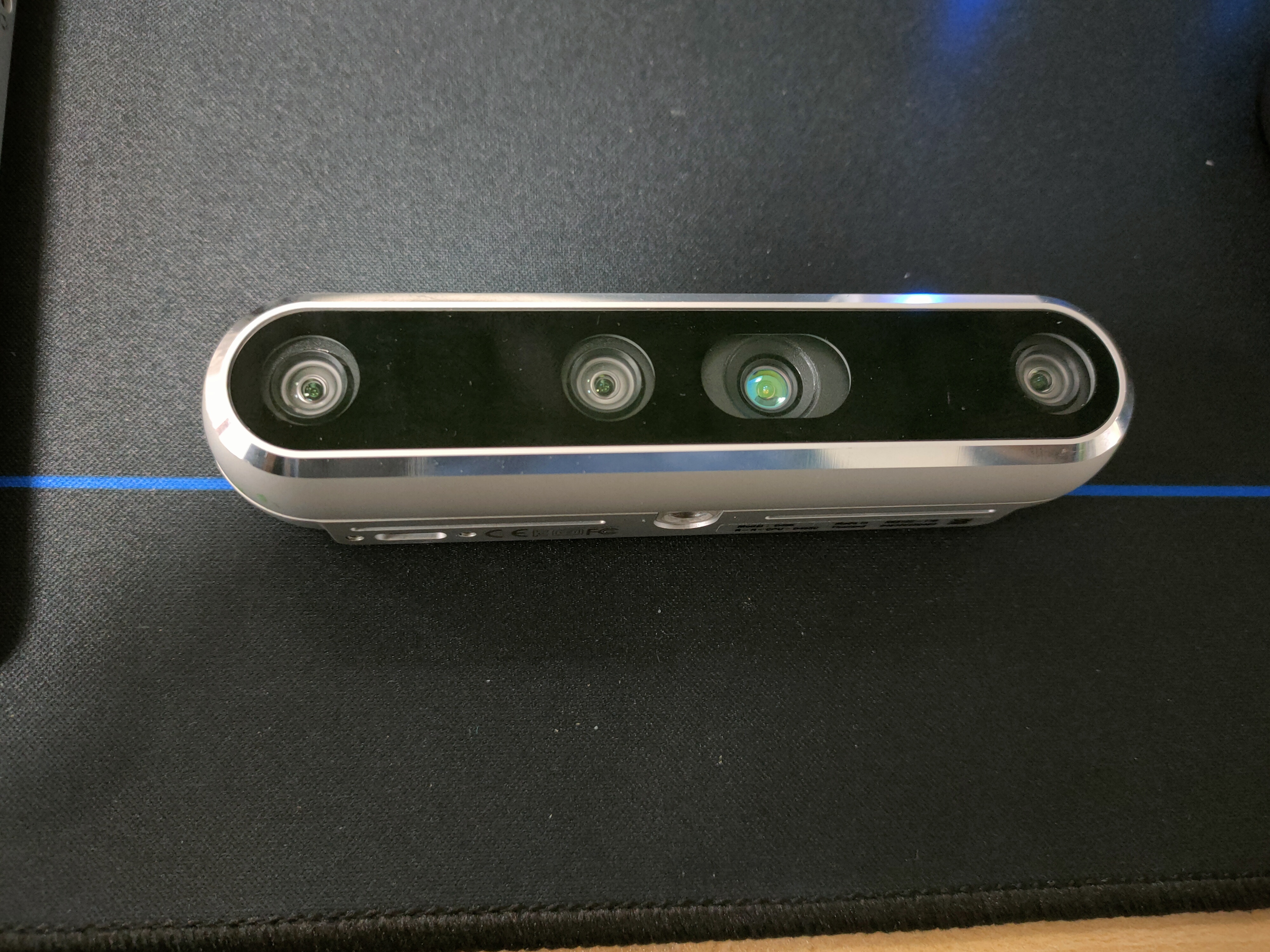
和 LPMS-IG1 RS232 两种:

尝试过网络上很多解决上述问题的方法,但是都没有成效
@piedaochuan1234 yaml文件里的blind参数是用来消除距离小于blind大小的点,因为velodyne里面无效点坐标是0,0,0,所以如果用velodyne跑算法其实是滤除了无效点
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.
大佬,请问我在镭神雷达与IMU标定时,出现Failed to find match for field 'time'. 同时出现Compute offset time using constant rotation model问题,请问怎么回事,谢谢