FAST_LIO
 FAST_LIO copied to clipboard
FAST_LIO copied to clipboard
/Odometry 输出数据中没有twist数据(只有pose数据)- Rosbag example
大佬们好,我是一个刚接触slam、里程计等内容的小白,自己折腾不下去了,前来求助。
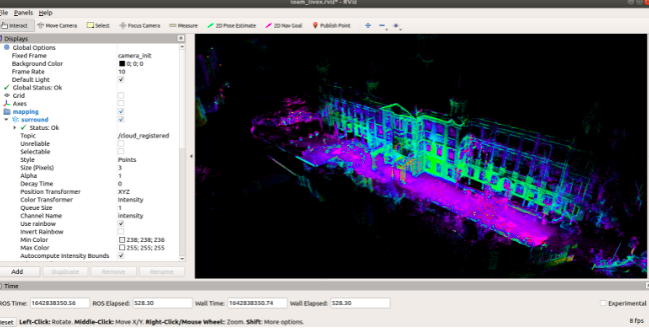
我按照提供的GitHub内容进行了Rosbag example的测试,rviz中的显示一切正常,跑不同的bag包有不同的rviz显示结果。下面这张图就是 Avia测试的rviz中的结果,使用的outdoor_Mainbuilding_10hz_2020-12-24-16-38-00.bag。
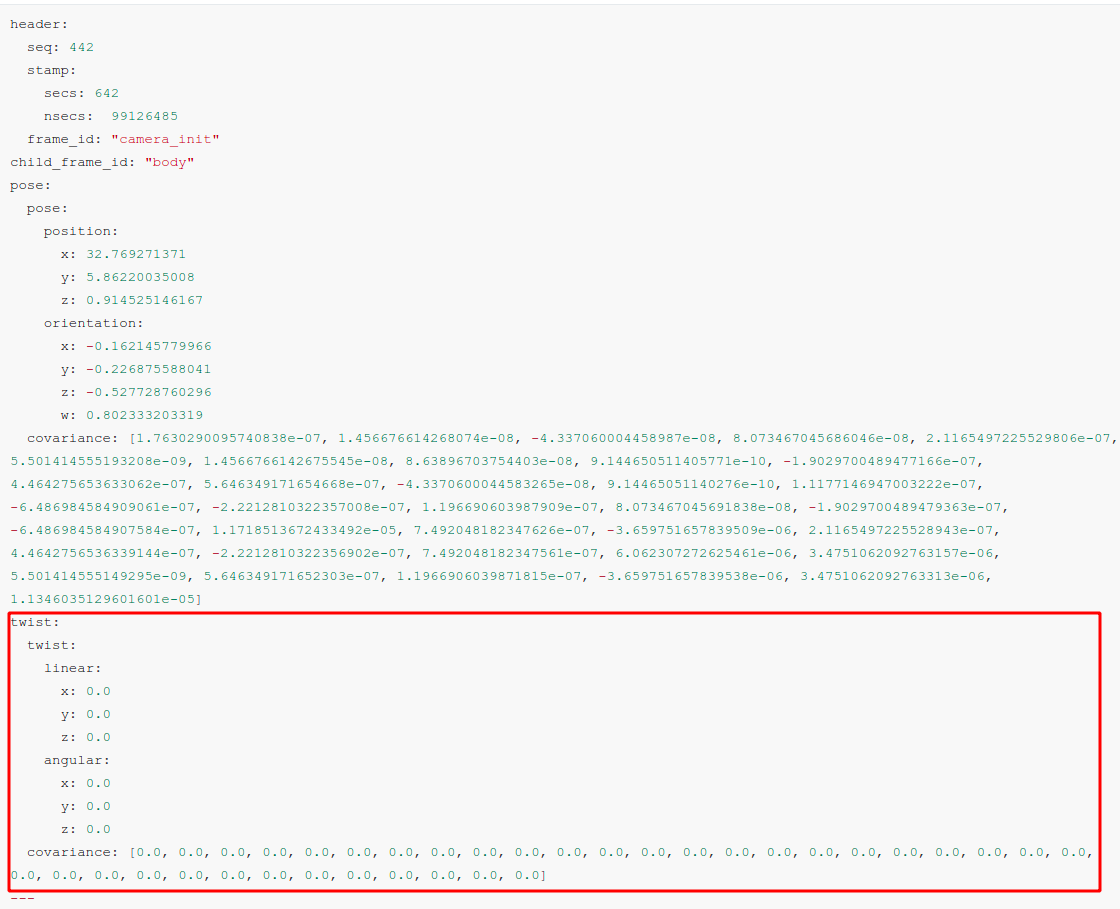
 这应该可以说明,我的一系列环境配置都没问题。但是,我在rosbag play xxx 时,观察了里程计的数据输出(/Odometry话题),发现输出中只有 pose数据,而twist数据全为0。我也测试了其他的bag文件,也进行了
这应该可以说明,我的一系列环境配置都没问题。但是,我在rosbag play xxx 时,观察了里程计的数据输出(/Odometry话题),发现输出中只有 pose数据,而twist数据全为0。我也测试了其他的bag文件,也进行了 Velodyne的bag文件测试。尽管这些测试都一切正常(rviz中看着挺正常的),但是其/Odometry输出数据中,所有的twist数据全为零。这是为什么呢?twist下不应该有数据吗?
可以参考下面这个gif动画(有些模糊,见谅)。
您知道这是为什么吗?我也并未对clone下来的源码进行改动过。
(下面是自己尝试寻找问题原因的插曲...)
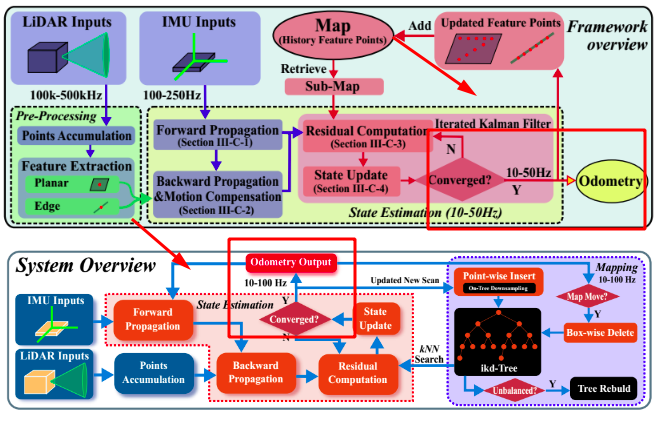
我也读了fastlio的两篇论文,把fastlio的大致流程弄明白了(应该...)。我发现两篇论文给的系统概览图中,都是Converged?都指向了Odometry,但是并未在论文中看见相关的描述(也可能是我没看到...)。然后,我尝试又从源代码中找找Odometry的输出,结果更是看不明白..... 不得已之下,只能向您请教一下了。
我最近在laserMapping.cpp中进行改动,似乎把twist数据中的linear xyz速度输出添加上了,但是angular xyz还没添加上。不知道angular的数据在哪里?请问能给一点提示吗? 添加linear xyz数据的代码改动如下:
// laserMapping.cpp 约580行处
// 自己加的函数
template<typename T>
void set_twiststamp(T & out)
{
// 这三个 xyz的速度没问题
out.twist.linear.x = state_point.vel(0);
out.twist.linear.y = state_point.vel(1);
out.twist.linear.z = state_point.vel(2);
// 没找到 angular 数据储存在哪里
// out.twist.angular.x = ;
// out.twist.angular.y = ;
// out.twist.angular.z = ;
}
void publish_odometry(const ros::Publisher & pubOdomAftMapped)
{
odomAftMapped.header.frame_id = "camera_init";
odomAftMapped.child_frame_id = "body";
odomAftMapped.header.stamp = ros::Time().fromSec(lidar_end_time);// ros::Time().fromSec(lidar_end_time);
set_posestamp(odomAftMapped.pose);
// 自己加的一个函数 publish_odometry()中仅这里有改动
set_twiststamp(odomAftMapped.twist);
// 发布里程计数据
pubOdomAftMapped.publish(odomAftMapped);
auto P = kf.get_P();
// 后面的内容并未改动,为节省篇幅,已经删去
}
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.
您好,不知道您的问题解决了没有。我最近学习了fast-lio的源码,发现代码在设置状态变量的时候并没有将角速度作为状态变量设置,因此无法从state_point里获得。但是imu是可以直接测量角速度的,如果想将角速度整合进odom进行发布,或许可以尝试获取Measures结构体中或imu_buffer中存储的imu角速度。以使用Measures结构体为例,可以将您的set_twiststamp()函数修改如下:
template<typename T>
void set_twiststamp(T & out)
{
out.twist.linear.x = state_point.vel(0);
out.twist.linear.y = state_point.vel(1);
out.twist.linear.z = state_point.vel(2);
// Measures 结构体定义于common_lib.h文件中
out.twist.angular.x = Measures.imu.back()->angular_velocity.x;
out.twist.angular.y = Measures.imu.back()->angular_velocity.y;
out.twist.angular.z = Measures.imu.back()->angular_velocity.z;
}