FAST_LIO
 FAST_LIO copied to clipboard
FAST_LIO copied to clipboard
A computationally efficient and robust LiDAR-inertial odometry (LIO) package

> 你现在就可以试试打开time_sync_en,看看mid70的效果如何。 **Rosbag和录像在下面链接**: https://www.jianguoyun.com/p/DQS2A9gQsP6nCBisvv8D **测试机体是mid-70** 没有做imu和lidar的位置的准确标定,imu在lidar左半边上方如下图:  **代码能跑,墙体似乎比loam版本更平直,点云更清晰,还发现如下点**: - x和y轴较稳定 - 扫描出的点云体有时轻微错位重叠,怀疑是lidar&imu sync没有做硬同步的原因 - z轴变动超过15度左右,会产生大范围漂移 (看视频第40s: ROSBAG和video.mp4 ) - 实际操作和z轴数据上下相反:往上抬高机器,rviz里雷达会往下扫;往下压机器,rviz里雷达会向上扫 (同样看第40s视频: ROSBAG和video.mp4 )。猜测可能是avia.yaml里,单位矩阵或Z做标符号填写的原因,如下图:  _Originally posted by @Noahcuptea in https://github.com/hku-mars/FAST_LIO/issues/25#issuecomment-876541461_
[calib_result0328.csv](https://github.com/hku-mars/FAST_LIO/files/8377120/calib_result0328.csv) mapping: acc_cov: 0.1 gyr_cov: 0.1 b_acc_cov: 0.0001 b_gyr_cov: 0.0001 fov_degree: 180 det_range: 100.0 extrinsic_est_en: false # true: enable the online estimation of IMU-LiDAR extrinsic, extrinsic_T: [ 0, 0, 0.28]...
How to find the extrinsic relation between lidar and IMU? Also how to find IMU intrinsic parameters?
老师你好,我使用ros16.04运行代码时,cpu占用时ros18.04的5倍多,我已经配置了pcl和eigen版本了。咱们ros版本是必须要升级的吗,还有要求其他库的版本吗?
I am using ouster lidar os1-128. When I use "rosbag play my_file.bag", I face this problem. `[laserMapping-2] process has died [pid 38057, exit code -11, cmd /home/ubuntu/A_ROS_DIR/devel/lib/fast_lio/fastlio_mapping __name:=laserMapping __log:=/home/ubuntu/.ros/log/54920bae-f201-11ec-9999-6d259b2401ed/laserMapping-2.log]. log...
sorry, it affects nothing but Stuck and stopped
I tried to use FAST_LIO with Livox Tele-15. The weird thing is that it ran quite well with Avia config. However, if I changed the FOV to 15 degree (Tele-15's...
Hello everyone, i am trying to build the package, but when i write catkin_make it fails being unable to find Pose6D.h: `[ 8%] Building CXX object FAST_LIO/CMakeFiles/fastlio_mapping.dir/src/laserMapping.cpp.o In file included...
Hey, do you guys have any pointers on how to integrate L515 with FAST_LIO I've seen https://github.com/hku-mars/FAST_LIO/blob/c8aea0dd95e4f78203b79329dd59ccdd687c1bd7/src/preprocess.cpp#L49-L66 And also seen the specific handers for each lidar, but i am not...
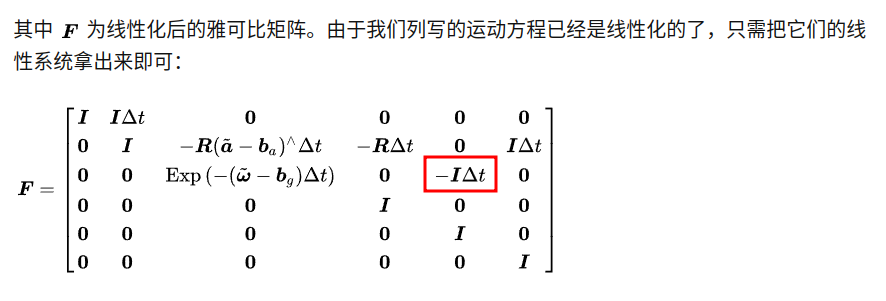
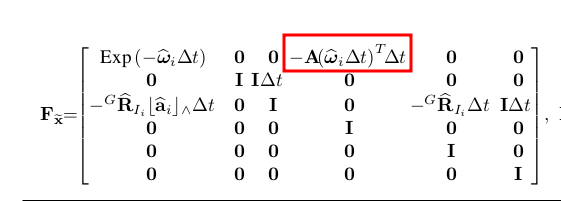
如下图1为高翔老师在简明ESKF中的状态方程F雅克比矩阵推导,图二为FASTLIO1 论文中的F阵推导,经比对,其他项的雅克比都是一样的,但是红色框的部分(delta_R 对 dleta_bg 求雅克比),这里的A阵是一个小量吗,推导是怎样的,希望能解惑,谢谢。