Cylinder3D
 Cylinder3D copied to clipboard
Cylinder3D copied to clipboard
Rank 1st in the leaderboard of SemanticKITTI semantic segmentation (both single-scan and multi-scan) (Nov. 2020) (CVPR2021 Oral)
Lane

Thanks for your model, We noticed that KITTI has lane label, but you don't use it as a result in your model. Is it easy to use radar data for...
After cloning I ran `docker build -t 3dseg .`. Build is failing at step 30 with following error. ``` Step 30/36 : RUN python3 setup.py bdist_wheel ---> Running in a575717e6e68...
Dear author, I have debug the code ,and I got a confuse. why use the val_pt_labs ?? why not use "val_vox_label"? 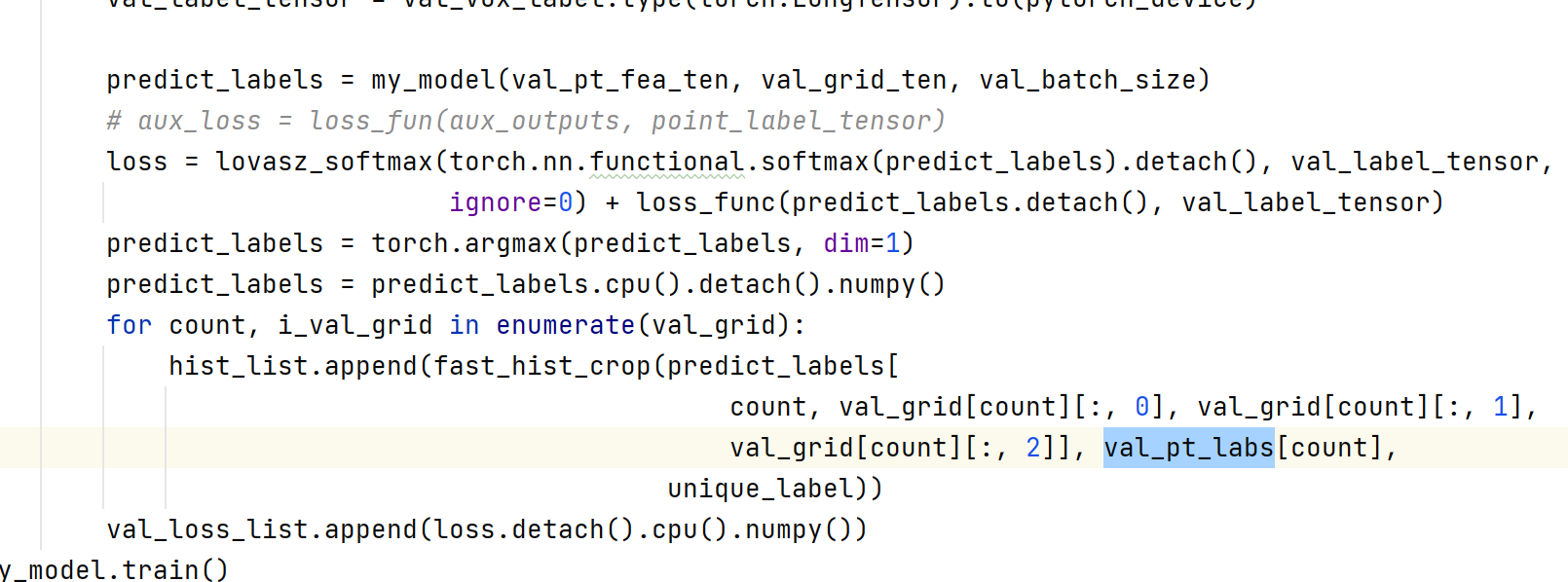 really hope for your reply!
Hi everyone. I have run this project passing lidar data from semantickitti to the project. I am using an nvidia GPU that is 2GB, and I am getting the following...
Dear author, I want to find the test_model.py in the repo . But ,I cannot find it. I just found the train_model.py Could I have the test.py ? Thanks a...
Dear Authors, In the function fast_hist_crop, I see that you are removing the 0th row and 0th column before calculating the IOU. However, this will remove the points predicted 0...
Dear author, I'm running the code step by step ,but when it run at the upblock0 part, after the " self.up_subm = spconv.SparseInverseConv3d(out_filters, out_filters, kernel_size=3, indice_key=up_key, bias=False)" I got an...
Dear, thanks for your great code. Be very grateful. I am interested in the part of visualization about the cylindrial coordinate pointcloud? But I cannot find the code in the...
Hi,thank you for the great work! 1.The loss function in this work is the same as the loss function in polarseg, right? 2.I used the same data (my own data...