XTDrone
 XTDrone copied to clipboard
XTDrone copied to clipboard
UAV Simulation Platform based on PX4, ROS and Gazebo
将xtdrone_qt复制到工作空间进行编译后出现: By not providing "Findcontrol.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "control", but CMake did not find one. Could not find...
在配置1.13版本的过程中,为什么在执行XTDrone源码下载步骤之前可以和mavros正常连接,执行XTDrone源码下载步骤之后,若不重新编译,同样能连接成功,但重新编译之后便不能与mavros成功连接了,这是为什么呢,试过很多次都是这样。
您好,当使用iris_3d_gpu_lidar机型开展3D SLAM实验时,我按照手册https://www.yuque.com/xtdrone/manual_cn/3d_laserslam要求在outdoor1.launch中切换了机型,当运行时出现如下错误: ERROR [init] Unknown model iris_3d_gpu_lidar (not found by name on /home/lhy/.ros/sitl_iris_3d_gpu_lidar_0/etc/init.d-posix/airframes) ERROR [px4] Startup script returned with return value: 256 *XTDrone的其他模块安装和测试过程如预期一样,是正常的,使用iris、rover等基本模型,运行也是正常的。 *PC系统是 Ubutu18.04 *ROS 版本:melodic 有遇到类似问题的吗,
开启风插件失败

我在indoor1.world中加入了下面这个 base_link 1 0 0 0 1 0 4.0 0 0 0 0 0 0 world_wind 然后gazebo就报错了 [INFO] [1681302260.387756, 0.000000]: Calling service /gazebo/spawn_sdf_model [ INFO] [1681302260.393789246]: waitForService: Service [/gazebo/set_physics_properties] is...
当启动自动降落脚本后有一台无人机可以降落,其余两个无法正常降落且rviz中无图像及话题信息 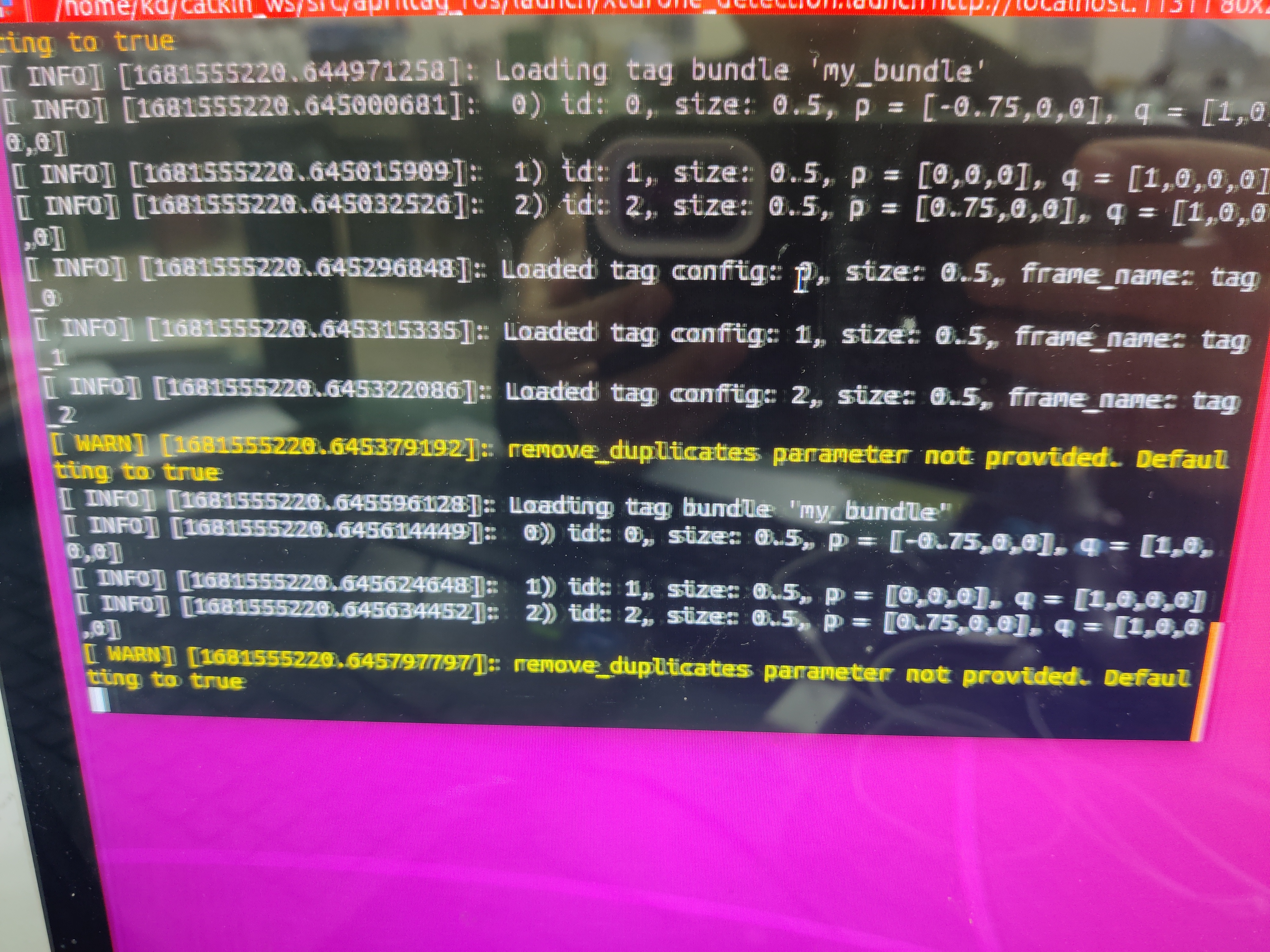
您好!我运行roslaunch px4 mavros_posix_sitl.launch进行仿真时,出现warning: ``` [ WARN] [1681284077.726185083, 12.784000000]: PR: request param #479 timeout, retries left 2, and 1 params still missing [ WARN] [1681284077.726410573, 12.784000000]: PR: Param RC4_MAX (478/602): 2000...
camera_info和vins-fusion启动文件中用的相机畸变参数K1 K2不一致是为什么? vins-fusion中是: k1: -0.01 k2: 0.004 camera_info: k1: -0.1 k2: 0.04 单目的参数是多少呢,想用单目做SLAM,不知道参数是否正确.
编译ego_planner报错: /home/xxx/catkin_ws/src/ego_planner/plan_env/include/plan_env/grid_map.h:90:对‘cv::Mat::Mat()’未定义的引用 /home/xxx/catkin_ws/src/ego_planner/plan_env/include/plan_env/grid_map.h:90:对‘cv::Mat::Mat()’未定义的引用
Metadata
Owner
Metadata
UAV Simulation Platform based on PX4, ROS and Gazebo