XTDrone
 XTDrone copied to clipboard
XTDrone copied to clipboard
UAV Simulation Platform based on PX4, ROS and Gazebo
 无人机实际上已经降落了但是rviz里面还在转,好神奇

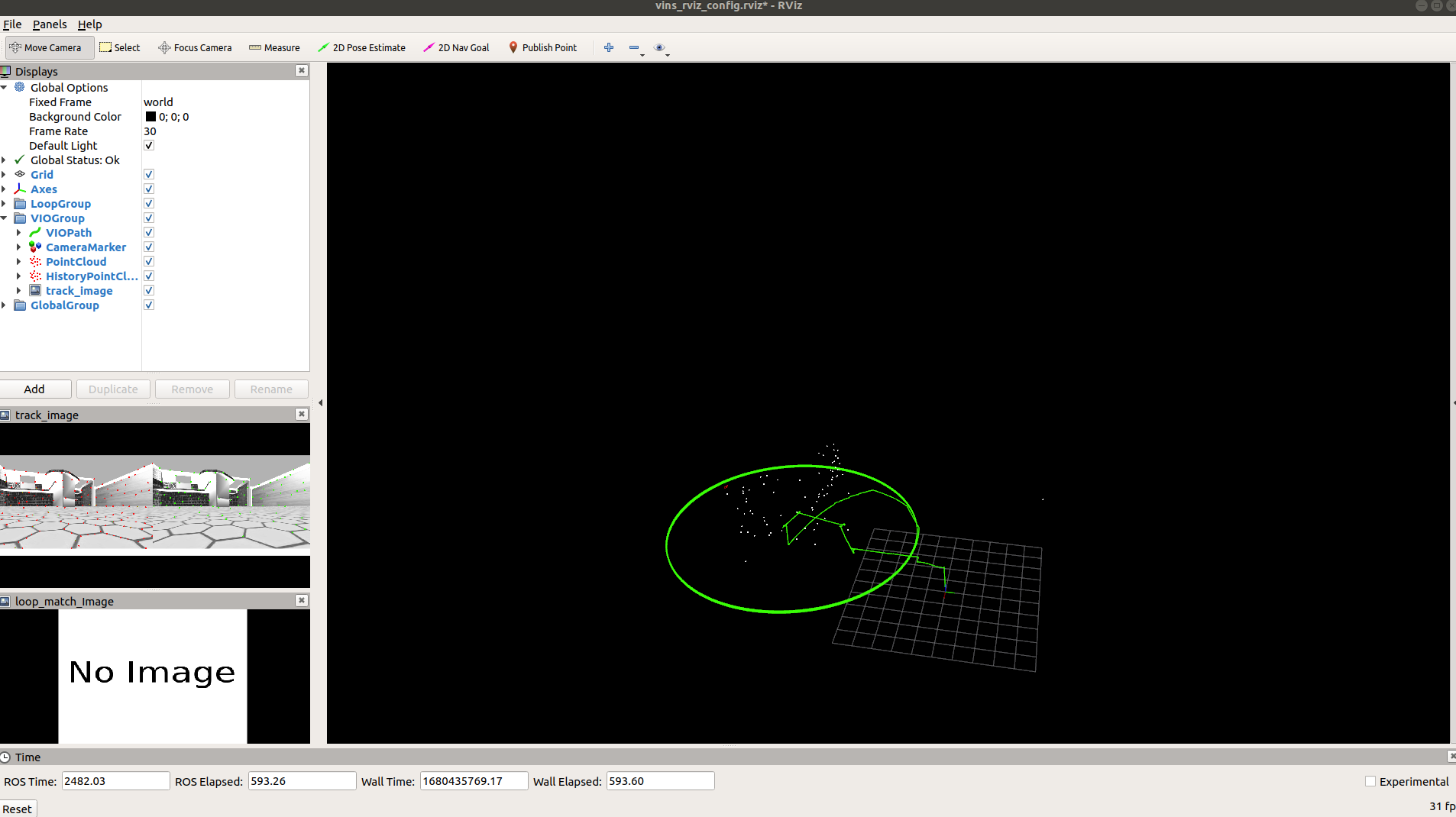
如下图,我将launch文件中的iris_stereo_camera换成iris_realsense_camera后,  在跑vio是可以的但是这里就找不到图像了。  然后终端部分是:  [ERROR] [1680057241.818750807, 2898.005000000]: PluginlibFactory: The plugin for class 'octomap_rviz_plugin/ColorOccupancyGrid' failed to load. Error: According to the loaded plugin descriptions the class octomap_rviz_plugin/ColorOccupancyGrid with base...
用vins-fuison和ego跑三维路径规划,地图是indoor4;先是从起始点每隔一小段给一个目标点,让无人机走过拐角,同时rviz显示这段路的点云信息,然后再把目标点设在之前的起始点,规划的路径(红线)居然是直接穿过转角点云的,这是哪出问题了?  
您好!我想请问一下为什么运行vins的d435i示例的同时运行rtabmap_vins.launch(odemetry换成vins),建图没有拼接到一起,也就是在rviz里点云没有融合到一起?还有就是vins输出的frame_id是world,而文件里的frame_id是camera_link,这应该怎么改? ps:下面是我运行roslaunch vins rtabmap_vins.launch报的warning,这应该怎么解决?  ps:下面是rtabmap_vins.launch文件的修改 
[ERROR] [1671709007.982657462, 2009.169000000]: Depth Lost! EMERGENCY_STOP roslaunch ego_planner single_uav.launch 启动这个命令以后跑一段路程 报以上错误
这错误排查了我好久…… 正常ROS自己装的gazebo打开urdf模型是好的,但我按教程删除了gazebo_ros包编译了你们的之后就打开urdf模型出错了 [robot_1/spawn_urdf-8] process has died [pid 25248, exit code 1, cmd /home/cui/catkin_ws/src/gazebo_ros_pkgs/gazebo_ros/scripts/spawn_model -urdf -model robot_1 -x -3.5 -y 3.5 -z 0.0 -Y 0.0 -param robot_description __name:=spawn_urdf __log:=/home/cui/.ros/log/5ce78aa0-54e8-11ed-abd5-0013ef5f1159/robot_1-spawn_urdf-8.log]. from tf.transformations...
[gazebo-2] process has died [pid 3850, exit code 134, cmd /opt/ros/melodic/lib/gazebo_ros/gzserver -e ode /home/zdk/PX4_Firmware/Tools/sitl_gazebo/worlds/indoor1.world __name:=gazebo __log:=/home/zdk/.ros/log/01fcf3ec-53b1-11ed-bc97-d8bbc19da8dd/gazebo-2.log]. log file: /home/zdk/.ros/log/01fcf3ec-53b1-11ed-bc97-d8bbc19da8dd/gazebo-2*.log Aborted (core dumped) [gazebo_gui-3] process has died [pid 3852, exit code...
第一个问题:运行indoor1.launch后i,/iris_0/stereo_camera/right/image_raw、/iris_0/stereo_camera/right/image_raw、/iris_0/imu_gazebo三个话题都有数据, 但是vins相关的话题,/vins_estimator/image_track、/vins_estimator/camera_pose都没有数据输出,rviz图像位置不显示,EKF2已修改为视觉导航模式,因为vins无法输出位姿,因此解锁飞机时没有反应。请问这是什么问题? 以下是相关消息数据:     仿真环境与vins运行窗口为  `ssz@ssz-G5-5500:~/WorkSpace/Auto-Uav/PX4_Firmware$ roslaunch px4 indoor1.launch ... logging to /home/ssz/.ros/log/b94d2e08-eb23-11ee-8e4a-f5e9abdcc60b/roslaunch-ssz-G5-5500-3418492.log Checking log directory for disk usage. This may take a while. Press Ctrl-C...
在执行 cd ~/catkin_ws bash scripts/xtdrone_run_vio.sh 后,rviz里面没有点云数据 
首先开启固定翼仿真 ```cpp roslaunch px4 outdoor2.launch ``` 之后运行offboard节点,以下是我的offboard节点代码 ```cpp #include #include #include #include #include mavros_msgs::State current_state; void state_cb(const mavros_msgs::State::ConstPtr& msg){ current_state = *msg; } int main(int argc, char **argv){ ros::init(argc, argv,...
Metadata
Owner
Metadata
UAV Simulation Platform based on PX4, ROS and Gazebo