Junwoo Hwang
Junwoo Hwang
FYI, iNAV also suffered from this 😊 https://github.com/iNavFlight/inav/pull/2171
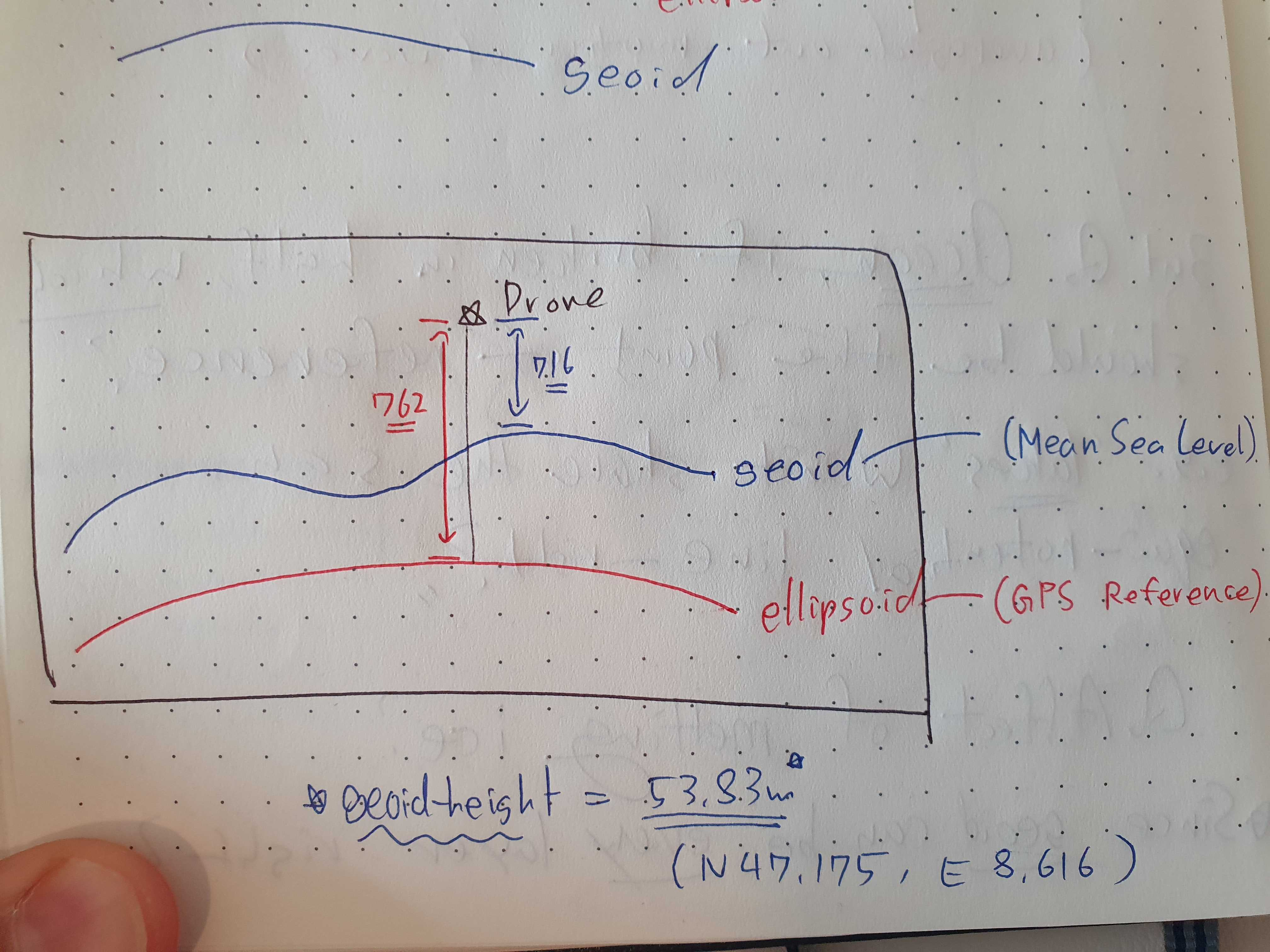 Here's a diagram I drew to show the difference between AMSL vs Ellipsoidal height.
Hi! I will be able to work on this 😊. Btw are you on px4 slack? We could chat in the #rover channel to discuss your project as well 🤔
> @junwoo091400 Do you have an ETA on when you would work on this? Otherwise I can already do it in case you haven't started yet Got side tracked 👻,...
Any updates? @Jaeyoung-Lim Btw just found this PR that originally implemented this feature: https://github.com/mavlink/qgroundcontrol/pull/6295
Thanks for the review! Ah so the uri include was missing 🤦♂️. I will add that 👍 But I have also noticed other differences as well: - The airspeed links...
I think I found the solution :thinking:, which is using a custom model with the airframe file specifying the parameters that needs to be changed on startup. It is of...
@thomasloupe any updates? I would be interested in helping out!
@Igor-Misic I believe you were working with Device Trees, do they exist in NuttX yet?
This is quite cool! And maybe worth keeping it open :raised_hands: