Follow Target message's GPS altitude is not AMSL, but Ellipsoidal Altitude
Expected Behavior
The QGC code encodes the FOLLOW_TARGET MAVLink message to send target's position. And the altitude should be in AMSL (Above Mean Sea Level), however the real testing on Android device has shown that it's rather reporting in Ellipsoidal Altitude.
https://github.com/mavlink/qgroundcontrol/blob/6db3447fa7c1531a28bf394f393dfdb59fc9145d/src/FollowMe/FollowMe.cc#L78-L111
Current Behavior
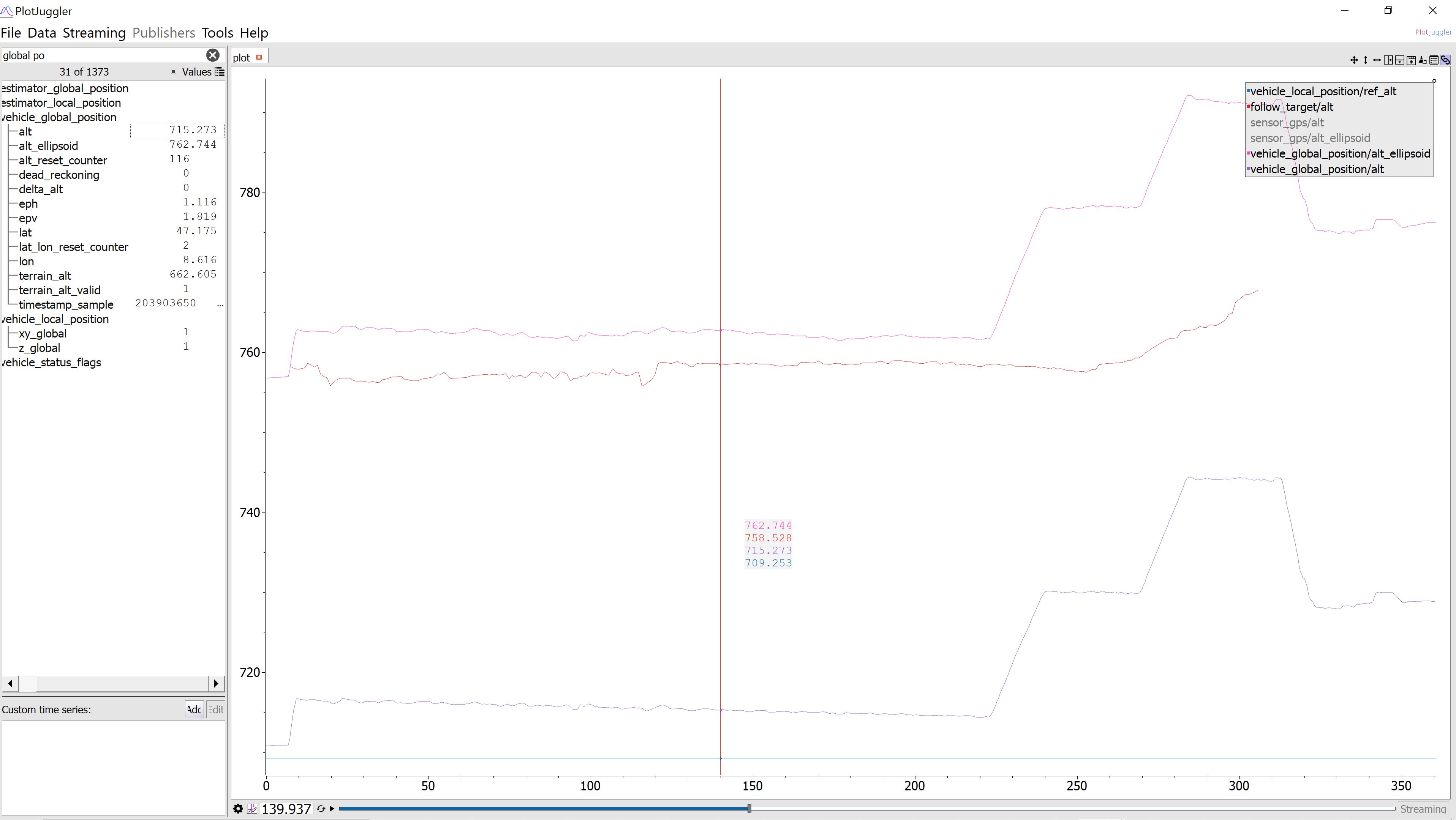
The follow_target's altitude is tracking along with drone's alt_ellipsoid, which is the ellipsoidal altitude. But it should be sent in reference to the AMSL altitude.
Detailed Description
The Qt interface that QGC is using, should be giving the AMSL altitude, but it't not. So it is likely a Qt Bug as well. But I haven't found resources online to discuss fix on Qt's side.
https://doc.qt.io/qt-5/qgeocoordinate.html#altitude-prop
This arises from a fact that MASL (Geoid as a reference) and Ellipsoidal Altitude (Ellipsoid as reference) differs!
Some related information for curious readers :
- https://en.wikipedia.org/wiki/Geoid
- https://gisgeography.com/geoid-mean-sea-level/
- https://stackoverflow.com/questions/11168306/is-androids-gps-altitude-incorrect-due-to-not-including-geoid-height
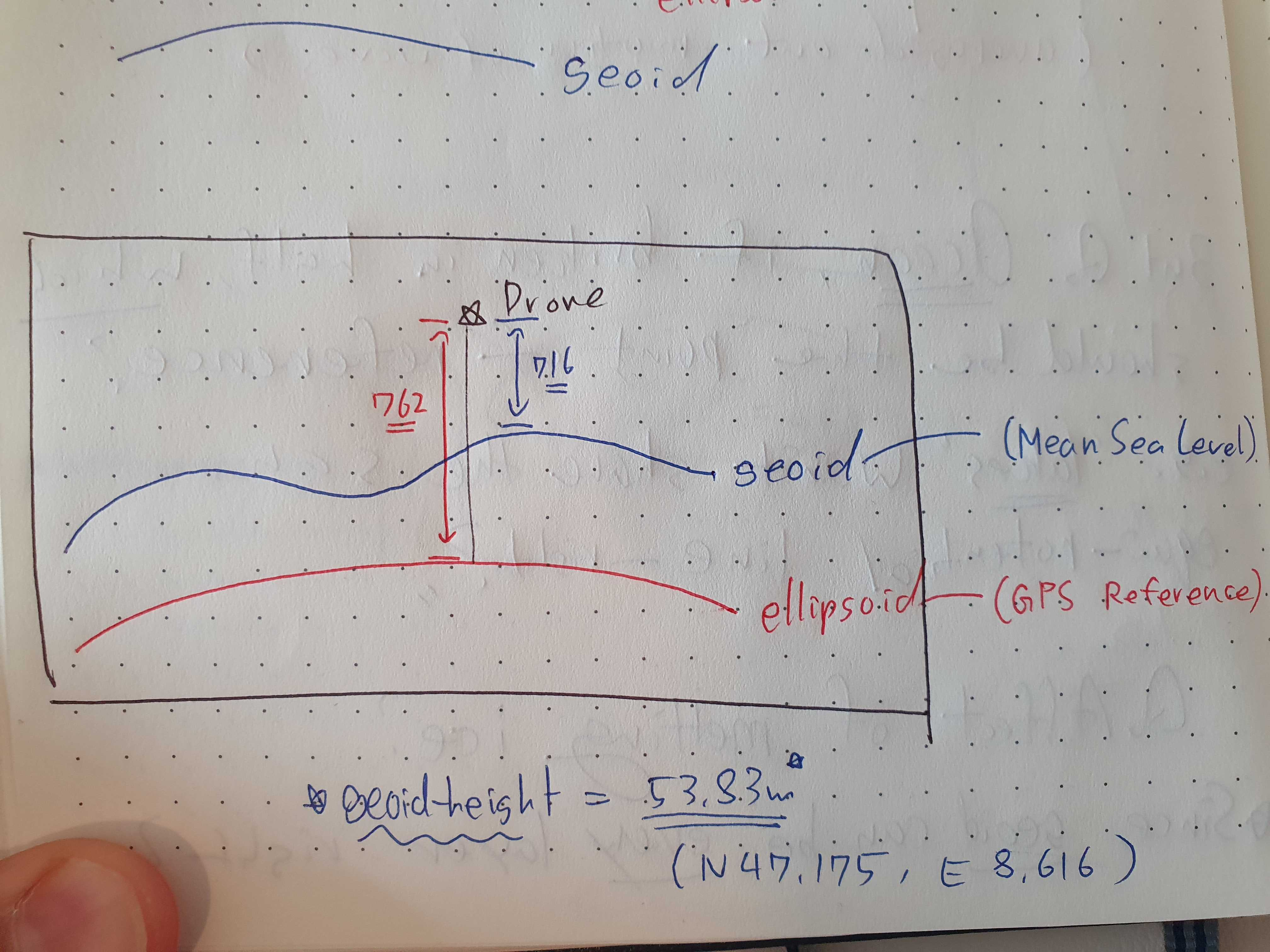
Here's a diagram I drew to show the difference between AMSL vs Ellipsoidal height.