ros2_ouster_drivers
 ros2_ouster_drivers copied to clipboard
ros2_ouster_drivers copied to clipboard
ROS2 Drivers for the Ouster OS-0, OS-1, and OS-2 Lidars
Firmware 2.3 allowed for the ability to request different data packet formats from the sensor. [1]. The Low Data Rate profile might help with robots with limited compute / network...
Making the drivers able to be run as a component makes ROS2 intraprocess comunication an option, but doesn't actually enable it. It needs to be enabled in either the `NodeOptions`...
## OS - Ubuntu 20.04 ## Ros2 version - Galactic ## Branch - Galactic ## Information As of now, the Ring field is defined in the point.h file as a...
In case you're getting this kind of error from the Lidar (OS0-128 in my case), I thought I should share a fix: 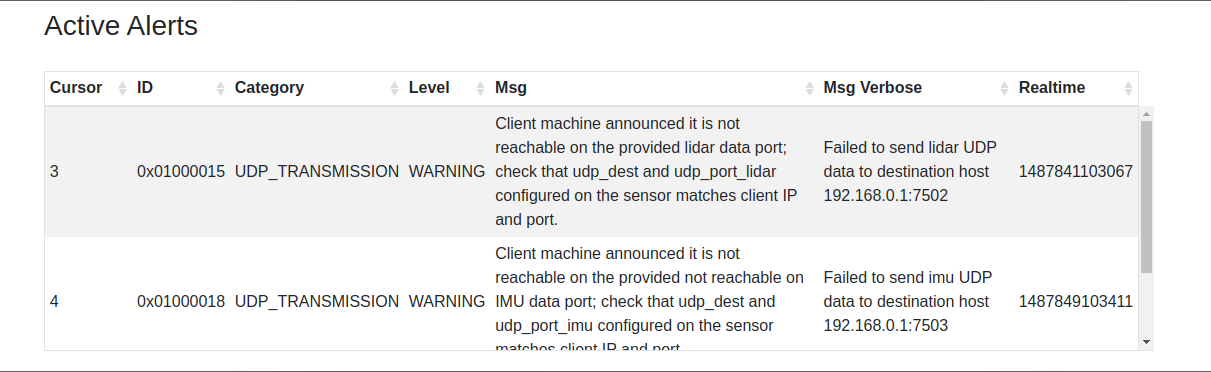 It could be that you're computer has...
This has been discussed slightly in [#84](https://github.com/ros-drivers/ros2_ouster_drivers/issues/84) but I figured the discussion has drawn out to the point where it deserves a a dedicated post with demonstration. The problem is...
When viewing the /scan and /points topic from this driver in RViz it appears the LaserScan is rotated ~10 degrees counter clockwise relative to the PointCloud which is correctly oriented....
Hello I just checked that the frame transformations on the tf_static topic are different from the transformations given in the Ouster Software Manual. This is the output if the /tf_static...
Tests

- create test sensor interface and make test to cover reset and configure services in active and inactive state - create lifecycle activate / deactivate / activate / reset script...
Details / logs to come. Just a warning I wanted to post right now to users of the repo that as of the latest commit on `ros2` (https://github.com/ros-drivers/ros2_ouster_drivers/commit/cdd778696dbe560699c96345aead75c5282dd93c) , to...
As described in https://github.com/ros-drivers/ros2_ouster_drivers/issues/116 Firmware 2.4 removes auto_start_flag and udp_ip, and therefore the lidar communication is not established when the lidar is on the newer firmware. v2.3 has been pulled...
Metadata
Owner
Metadata
ROS2 Drivers for the Ouster OS-0, OS-1, and OS-2 Lidars