rc_car_ros
 rc_car_ros copied to clipboard
rc_car_ros copied to clipboard
Published
20 hours ago •
 GigaFlopsis
GigaFlopsis
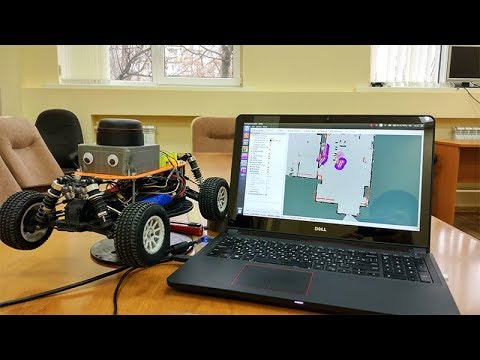
ROS package to control an autonomous RC vehicle based on Raspberry Pi3
Autonomous RC vehicle for ROS
ROS package to control an autonomous RC vehicle based on Raspberry Pi3.
This development includes of methods self-driving in indoor environment with used SLAM navigation rplidar A2
Authors: Dmitry Devitt, Konovalov Georgy
Maintainer: Dmitry Devitt, [email protected]
Affiliation: Raccoonlab, Rirpc Sfedu
Instruction

Configuration:
In current version, the platform has a lidar rplidar A2 and gyro MPU6050 (optional).
Complite tasks of the project:
- remote controll via ros_node
- ros_node for remote controll with joystick
- hector_mapping SLAM
- added Imu data from gyroscope MPU6050
- added AMCL
- added Imu data from flight controller (cc3d via mavros)
- added support teb_local_planner
- added pose controller
- swarm control: swarm-control branch
- added px4 navigation
The current tasks of the project:
- add odometry using optical encoders (optional)
Metadata
84
Stars
24
Forks
Watchers
Owner
Metadata
ROS package to control an autonomous RC vehicle based on Raspberry Pi3