livox
Hi @yuyu19970716 you can refer to ``` void LdsLidar::GetLidarDataCb(uint8_t handle, LivoxEthPacket *data, uint32_t data_num, void *client_data) { ... LivoxSpherPoint *p_point_data = (LivoxSpherPoint *)data->data; for (uint32_t i = 0; i <...
Hi @KNoda51 Yes,It's right behavior. Ros driver‘s current mechanism does not support receiving different lidar's point cloud data at once.
Hi vzhr Thanks for your advise. Appreciate it.
Hi @Grandit, [Timestamp Synchronization](https://github.com/Livox-SDK/Livox-SDK/wiki/Timestamp-Synchronization) might help you.
Hi Yuea922, 关于坐标系的说明可以参考用户手册-坐标系部分,以下为以Horizon为例的截图。 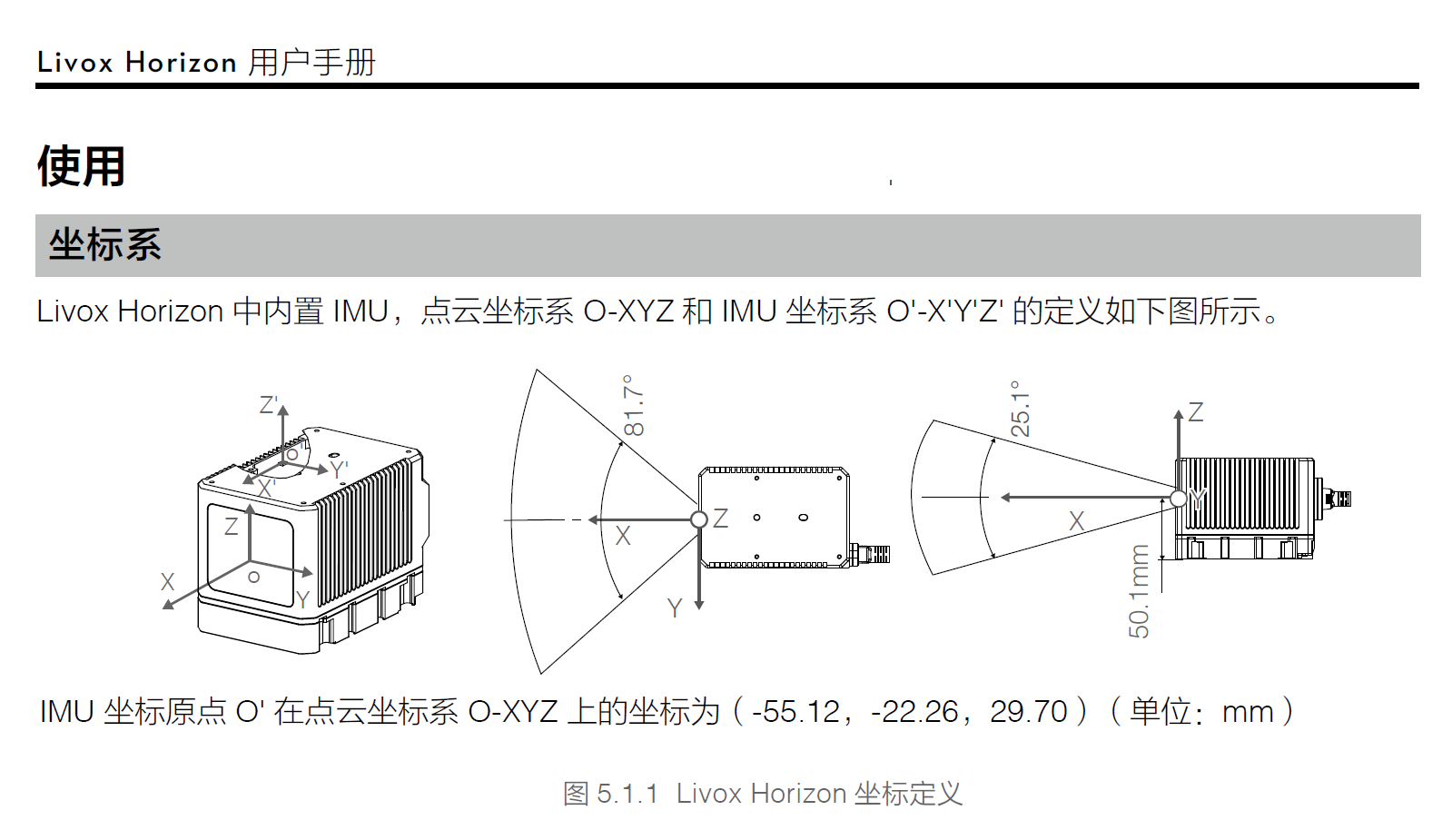
Hi @palffybalazs It's recommended to cache `LivoxEthPacket*data` to buffers like `point_packet_list` and start a timer on another thread to convert `point_packet_list` to `pcl::pointcloud`. e.g. ``` void LvxFileHandle::SaveFrameToLvxFile(std::list &point_packet_list) { for...
您好, 目前我们没有尝试过在 mingw编译器下编译过 livox-sdk;对于这方面的差异可以给您提供的帮助比较少。 可以参考一下这个链接中的相关描述: https://blog.csdn.net/caolinqing1/article/details/107714914 希望对您有帮助。
Hi Kaju-Bubanja Since our developing environment are Ubuntu 16.04 and 18.04, I have't try compiling this code under 20.04 and 22.04 environment, not 100% sure if it is running properly....
Hi WingmanMedia Compile SDK does not have to under Linux environment. You can refer to the description in the SDK-Readme file to compile SDK: 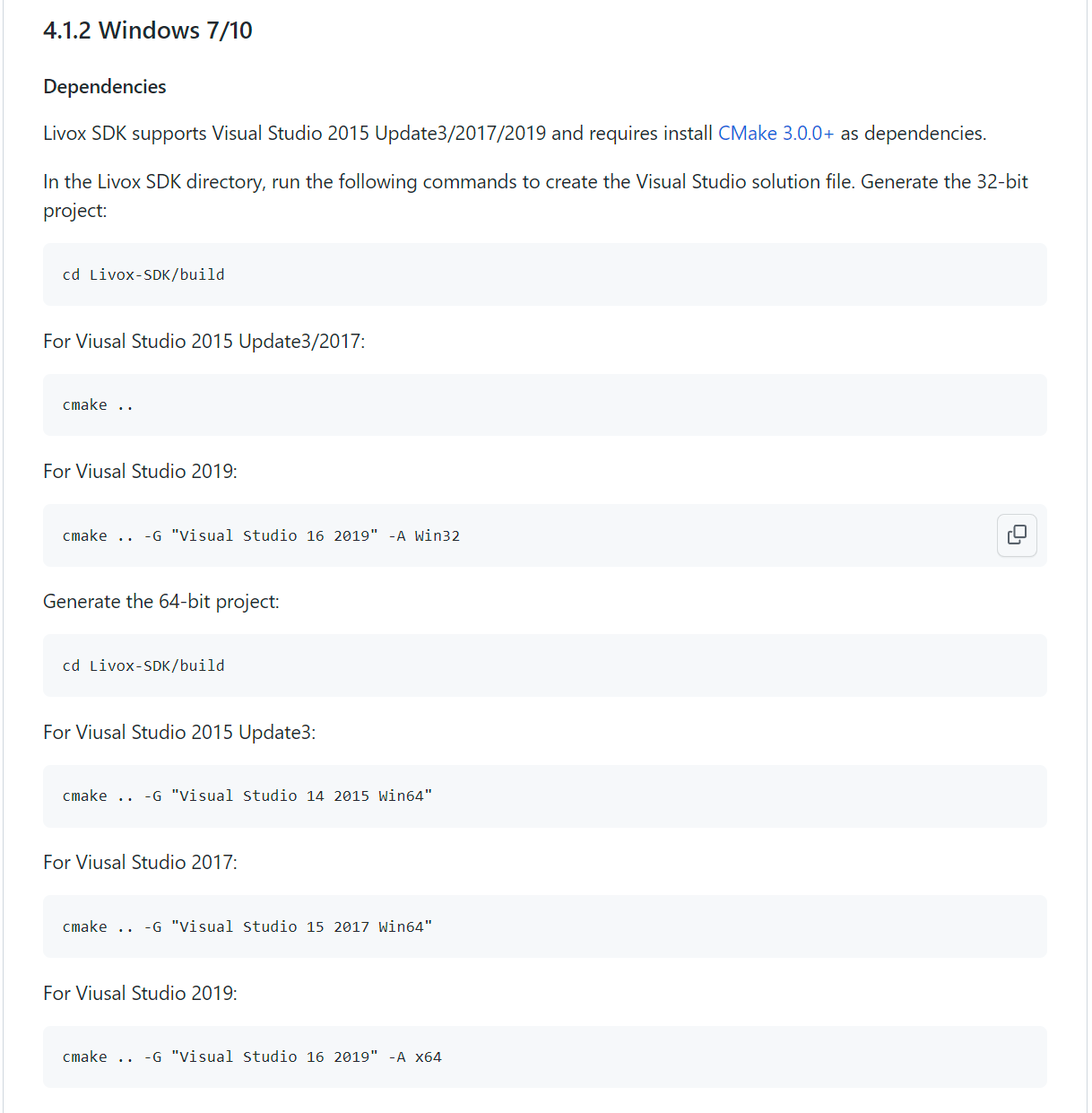
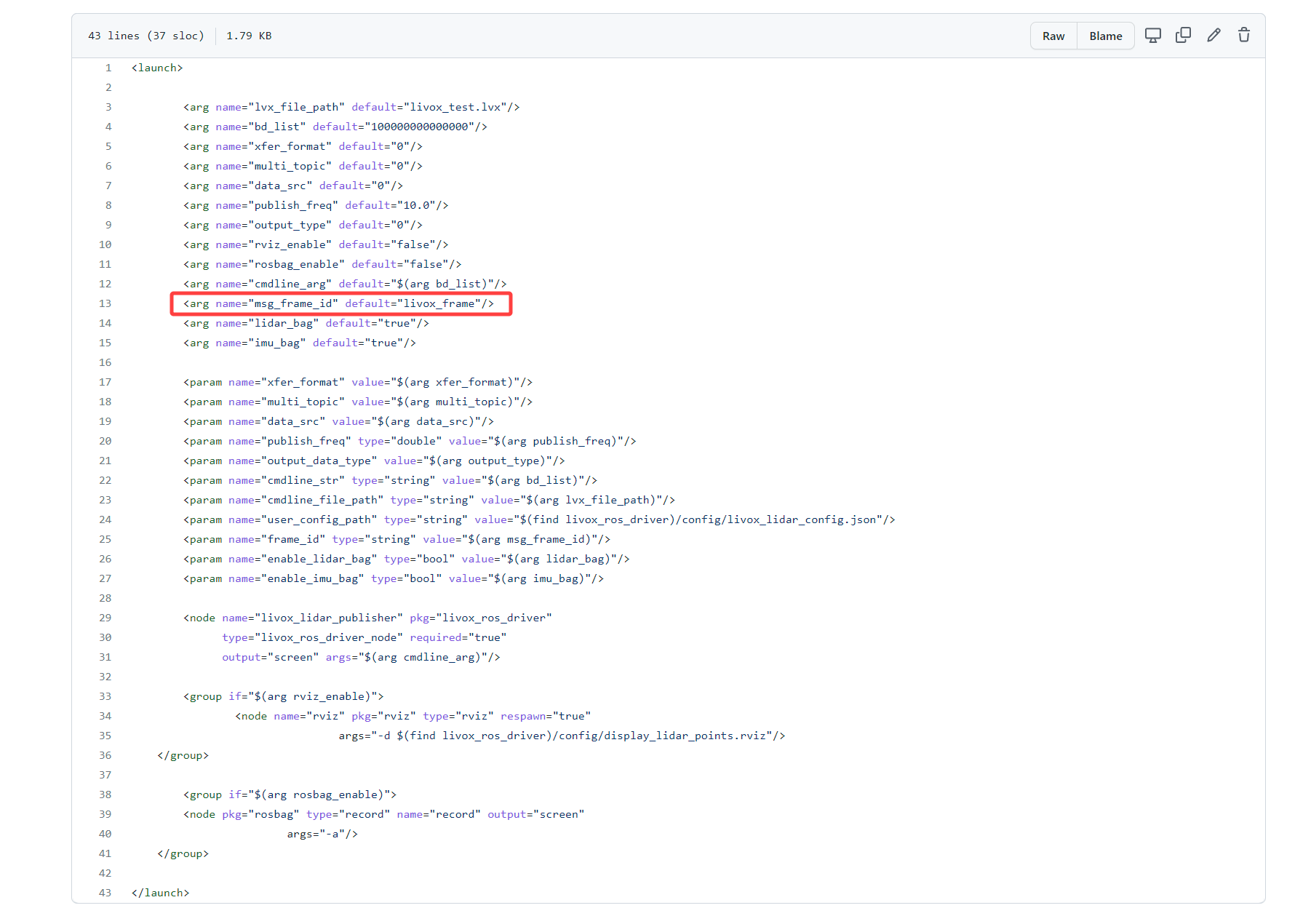
Hi lv-lan 您提出的应该是Ros-driver 相关的问题。 因为不是很清楚您报出的错误是什么,不清楚是否可能与您的二次开发相关。基于您目前的描述我建议您尝试修改launch文件中frame_id这个参数,改为统一的frame_id。