Vivek Aithal
Vivek Aithal

ToDo - ~~have a robust update logic for the corolla, like calibrationd~~ revisit if any issues - ~~resolve the first drive vs later drive discrepancies~~ revisit if any issues -...
Changes - Reduce low speed factor during high speeds (scales down the error) 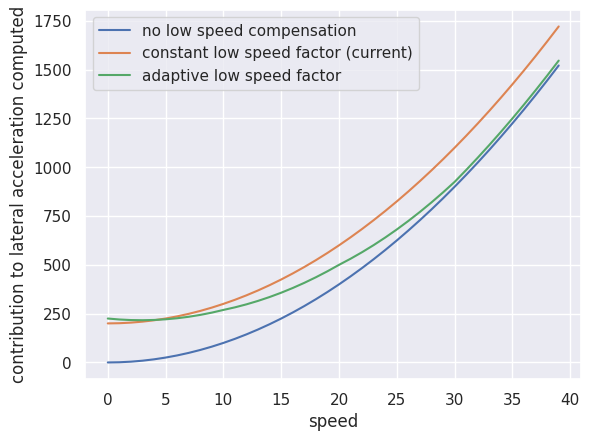 - Friction: Currently full friction is applied at `0.2` error (~4% of instances). Increase to `0.3`...
There are currently a lot of checks before observations are input into the kalman filter. This can lead to silent degradation of the filter if observations from some sensors are...
- Set deadzone back to 0 - Set lag from data, by eps fw versions - Set torqued offline values by fw versions
- Remove from substitute, add it's own values
- [x] Use more generic checks - [x] Use FirstOrderFilter - [x] Make running offline compatible - [x] Verify - [ ] Falsify, just to be sure
GM platforms (verified on `Bolt`, `Silverado`) have an internal rate limit on the `actuatorsOutput/steer` that we request. If the requested rate is higher than the internal rate, it has some...
A common issue is users having their wheels slightly misaligned. This causes the steering offsets to go out of acceptable bounds. The current error conflates this with other issues, and...
Ordinals necessary for https://github.com/commaai/openpilot/pull/31492