simulator
 simulator copied to clipboard
simulator copied to clipboard
A ROS/ROS2 Multi-robot Simulator for Autonomous Vehicles
In the web visual editor, the sensor coordinates are 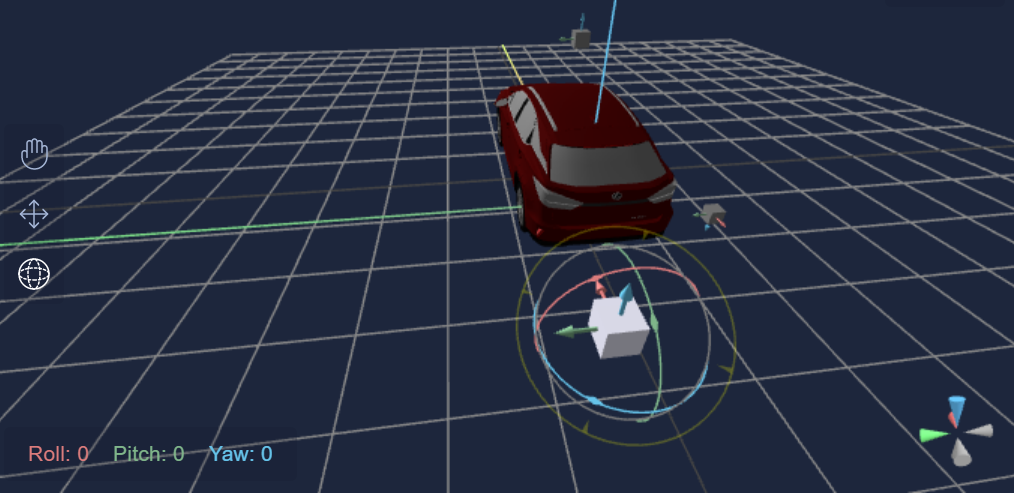  It is a right-hand coordinate. (x:forward, y: left, z: up, roll: rotate x-axis, pitch: rotate y-axis, yaw: rotate z-axis....
The sensor is no longer downloadable from the website,Are there any other ways to achieve this? Like download it through other links and put it in a particular folder? Thank...

Hello, When using the emulator, I want to solve the following problems: 1. There are created NPCS in the map, as well as simulated vehicles. 2. As the simulated vehicles...
Hy! **I am running Apollo on Ubuntu 20.04 on WSL2 within win10. I have installed SVL simulator on win 10. Apollo dreamview works fine and SVL simulator works fine.** When...
When i add a simulation selected random traffic in RuntimeTemplete option, I can receive message in apollo docker container; however, When i add a simulation selected visual scenario editor in...
It seems like just having the AssetBundle is not enough? Am I correct in this or am I missing something? It seems odd to build them into AssetBundles if those...
Hello, I set auto control = lgsvl_msgs::msg::VehicleControlData(); control.target_gear = lgsvl_msgs::msg::VehicleControlData::GEAR_DRIVE; control.acceleration_pct = _sampledrive.get_throttle(); // value is 0.5 control.target_wheel_angle = _sampledrive.get_steer(); // value is -0.5 control_pub->publish(control); But look the screenshot, [INFO]...
I have added the map but when I run the simulator the map is not visible.
After starting simulator, Offline button and link to cloud button are not working. Nvidia drivers are updated and there is no mesa vulkan drivers. **Output:** ``` $ ./simulator Set current...