easy_handeye
 easy_handeye copied to clipboard
easy_handeye copied to clipboard
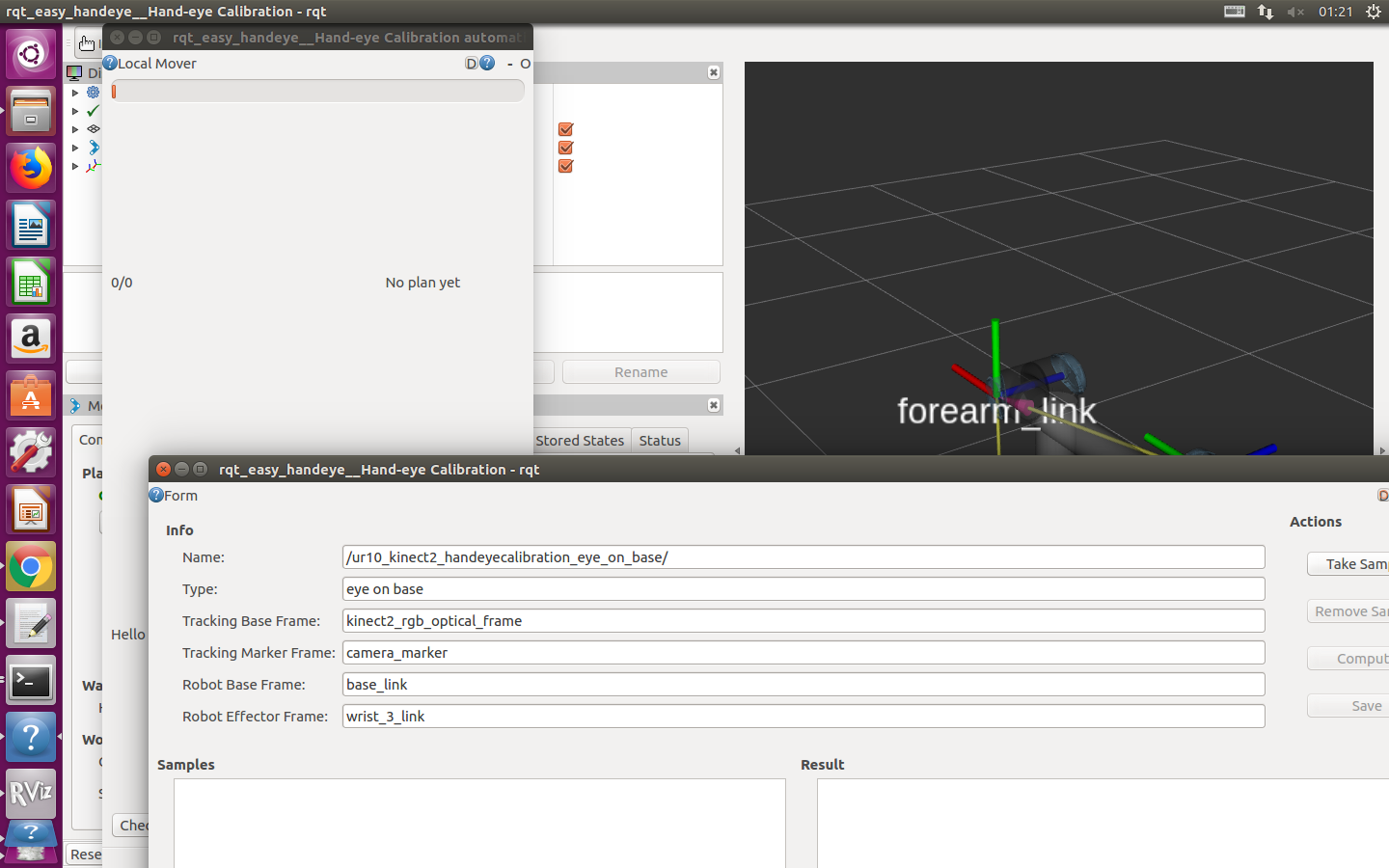
Automated, hardware-independent Hand-Eye Calibration
Hi All, I am using xArm7 with xArm Gripper and Real sense camera with eye-on-base configuration. I have query regarding calibration that hand-eye calibration should be done with gripper mounted...
When I run your package, in which the calibration **$(find easy_handeye)/launch/calibrate.launch** part, I got this question!!!! AttributeError: 'module' object has no attribute 'CALIB_HAND_EYE_TSAI' [ INFO] [1658930720.069630854]: rviz version 1.13.25 [...
Hi, I was looking for some advice from someone who was able to get this package working with ROS Noetic. The main issue I'm having is indirectly related to this...
Hi all, I am using this package on melodic + ROS + Ubuntu 18.04 + UR5 robot. As suggested by others, I have three launch file: the first one is...
In the gui rqt_easy_hand_eye,when i click "check starting pose " ,it return "Cannot calibrate from current position " . i try alter my origanal pose ,but it not work ....
 If I click takesample, I will report an error. I don't know the reason and ask for your help Error processing request: "camera_marker" passed to lookupTransform argument source_frame...
Thank you for this code. The typo is a bit confusing, I suppose the sec pic in use case should be eye-in-hand
Hello, I tried to use this package in the UR5 in Gazebo. I modified the example of ur5_kinect_calibration.launch to be below: ``` ``` I comment the Kinect related line and...
My eye-on-base calibration went really well, though a few little bumps, a **big THANKS** to the authors. Here is my final yaml file: _eye_on_hand: false robot_base_frame: fixed_link tracking_base_frame: camera_base_link transformation:...
Thank you!

Not really an Issue, just wanted to thank you. This package helped me with a crucial calibration that I needed on a tight schedule.