zpengch
zpengch
了解,我刚调试看了下,能够对应,谢谢
它们的坐标系是这么定义的吗? 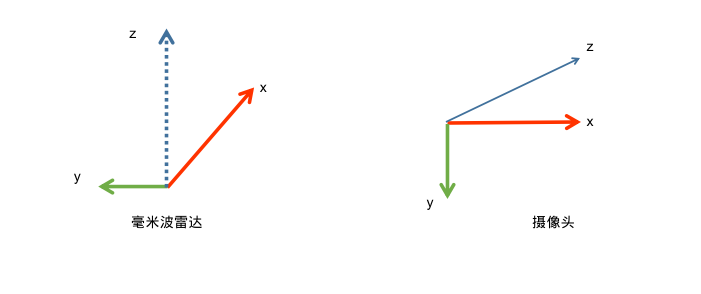
我觉得这个比较简单,可以根据csv中的字段,用C++或者Python写一个脚本去保存雷达数据,甚至只保存程序需要的字段
> > > 如何在lidar2camera项目中根据我的激光雷达和相机之间的PNG和PCD获取外部参数的初始值?所以我认为这是一个微调的工具,而不是校准的工具,对吧? > > > > > > 可以根据传感器坐标系的对应关系设置一个初始值。 > > 可以举个例子吗,或者推荐一下计算初值的相关资料,谢谢 就是根据你传感器的安装位置,给一个大概的初值,比如你认为传感器之间的旋转角为0度,就给0度,像激光雷达和相机的坐标系不一致,所以你的初值肯定要加一个旋转角