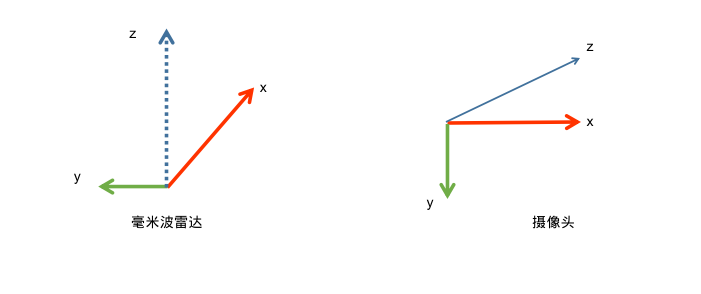
请问一下,我们使用的摄像头和雷达的坐标系都是右手坐标系的吗?我使用初始外参矩阵,不能将雷达坐标下的点转到相机坐标下
是的,可以检查一下坐标轴对应关系是否正确,或者在代码里面打印一下投影点信息看下
了解,我刚调试看了下,能够对应,谢谢
它们的坐标系是这么定义的吗?