Phil D.
![]()
Phil D.

Generated cpp code appears to assign results of multiple solutions to the same "argument" variable, and uses undeclared th_1, th_2, th_3 (etc) variables in solution calculations. The code won't compile,...
output_cpp.py contains the following code on line 106: ``` tmp += 'double '+str(p) + ' = XXXXX ; \\ deliberate undeclared error! USER needs to give numerical value\n' ``` This...
PyQt5 uses a more restrictive license (GPLv3) that requires developers share any source code for derivative works, under the same license. gui_tool uses the MIT license, which does not impose...
For some reason, rollPID OR pitchPID work perfectly, when the other is commented out, but they can't both exist at the same time, or whichever compute() method gets called first...
No idea what might break if compiling for (e.g.) Uno, nano, or M0.
It looks like racecar-v2 doesn't include ROS nodes for any cameras (ZED, structure.io, realsense, or whatever). Any plans to add this back in?
No idea what I'm doing wrong, but when I use this ULP, I get the above error.
My PID output goes crazy as my error approaches zero. What am I doing wrong? Kp=2 Ki=0.1 Kd=0.3 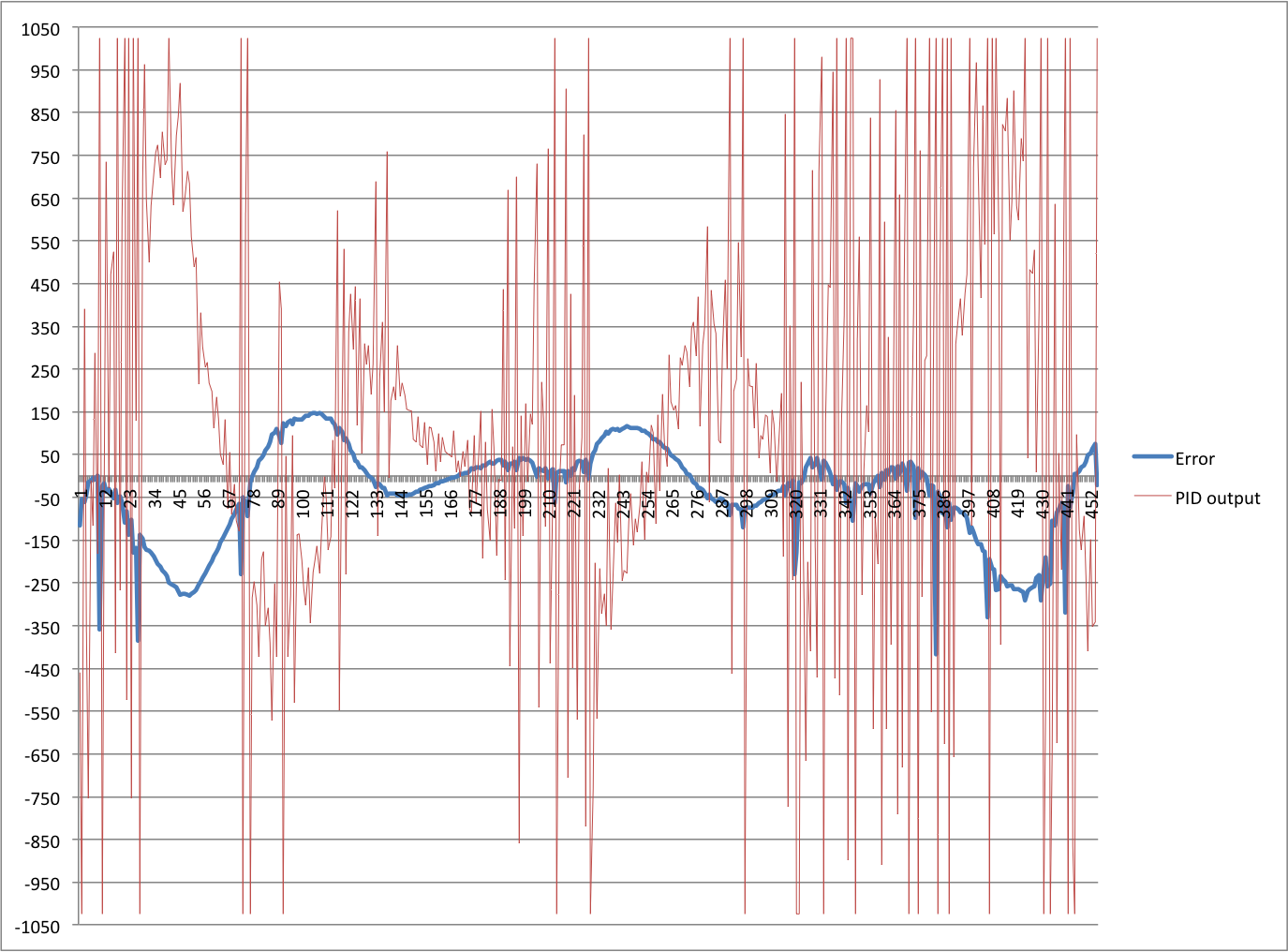
Would be useful to add a method to read back output limits. I'd submit a pull reuest, but it looks like those aren't being looked at...