matlabbe
![]()
matlabbe
For the static transform, it depends how the axes are oriented on the IMU. For the error, what kind of camera are you using? Are images of the camera stamped...
There could be a difference between how D435 and L515 cameras stamp their frames. Depending on the camera capability, the reslasense sdk may switch between internal camera clock and computer...
I agree, but it seems to be verified or set explicitly depending on the realsense sdk and realsense ros package: https://github.com/introlab/rtabmap_ros/issues/570#issuecomment-1013315742 Like in http://official-rtab-map-forum.206.s1.nabble.com/L515-T265-stops-mapping-after-a-few-frames-tp8659p8711.html, you can show side by side...
At least imu stamps are after camera stamps, so rtabmap is able to buffer imu messages and using them when receiving the corresponding images. But the inverse will throw the...
I did new bloom releases: Foxy: https://github.com/ros/rosdistro/pull/31163 Galactic: https://github.com/ros/rosdistro/pull/31164 Rolling: https://github.com/ros/rosdistro/pull/31165
rtabmap_ros for foxy and galactic pull requests have been made on rosdistro, they would appear in next ros2 release.
Thank you for your feedback, I am testing mainly on iPad Pro 2020 (A12z chip). Yesterday, I submitted a new 0.20.18 version particularly to fix performance issues on iPhone 13...
Here is one example of testing (>550 nodes, 117m travelled distance), we can show debug info by clicking Visibility...->Debug: 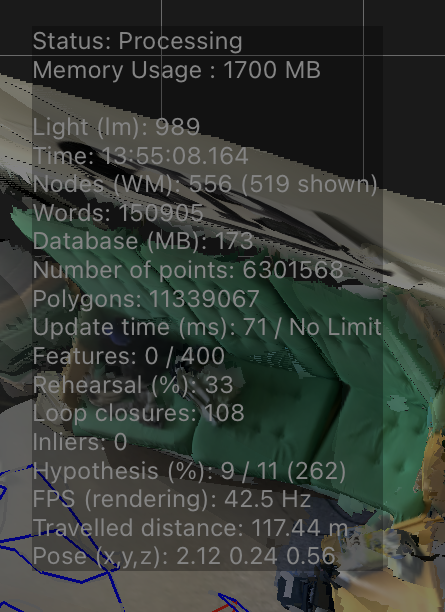 I didn't experienced any interruption during the scan, and the...
Which iphone/ipad are you using? You can decrease rendering quality parameters to save RAM to map larger environments. The full data is still saved in the database. Then for exporting,...
Please use ros2 branch, there is a commit [here](https://github.com/introlab/rtabmap_ros/commit/b81009b9f6f3491c5132ab5547ad73e9475ab345) that should fix that problem (https://github.com/introlab/rtabmap_ros/issues/725).