matlabbe
![]()
matlabbe
Make sure there is a grid showing up in Graph View. Press "Pause" then the option should be enabled: 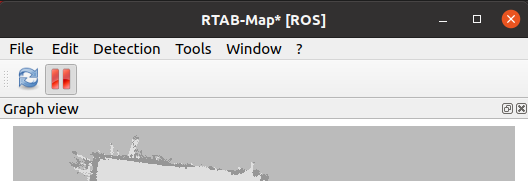 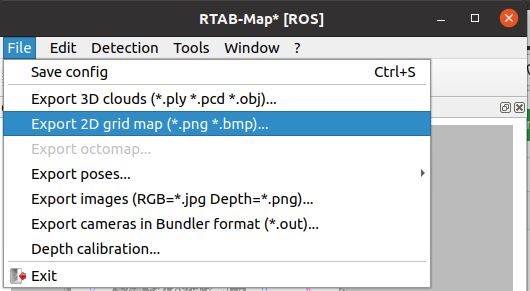 If you have...
You may look at this example: https://github.com/stereolabs/zed-examples/tree/master/tutorials/tutorial%201%20-%20hello%20ZED/cpp
So the whole window is considered an empty area? If it didn't happen before on same system, I think it could be related to Qt version. If you drag on...
Hi, You should not have to modify the cmake files. When using ORB_SLAM2, you cannot link on g2o installed in /usr/local. When doing "cmake WITH_G2O=OFF WITH_ORB_SLAM2=ON ..", g2o version in...
In the commit above, I added an option to RealSense driver to scale depth image to RGB size so that both images have the same size, which is required for...
You can do "bt" in gdb to get a backtrace. However, the error seems coming from ORB_SLAM2 library. I don't have this error on my system though, I can run...
I just checked the differences in my clone of ORB_SLAM2 code, and I removed` -march=native` flags (as PCL on Ubuntu 16.04 is not built with this flag): ``` ~/workspace/ORB_SLAM2$ git...
It is strange, these functions should be in PreferencesDialog.cpp: https://github.com/introlab/rtabmap/blob/89a0eb506b7e45464d76248bf778bf13646fc5cb/guilib/src/PreferencesDialog.cpp#L5338-L5341 https://github.com/introlab/rtabmap/blob/89a0eb506b7e45464d76248bf778bf13646fc5cb/guilib/src/PreferencesDialog.cpp#L4416-L4419
There is a patch [here](https://github.com/introlab/rtabmap/blob/af9e11311275a9cf0ac9a9294d3a167808fb0e72/docker/jfr2018/Dockerfile#L139) to make ORB_SLAM2 without `-mach=native` flag. Your error maybe related to this flag, as g2o is using Eigen. https://gist.githubusercontent.com/matlabbe/c10403c5d44af85cc3585c0e1c601a60/raw/48adf04098960d86ddf225f1a8c68af87bfcf56e/orbslam2_f2e6f51_marchnative_disabled.patch
Not officially supported (as I could not test it myself yet), but I updated the windows binaries created from automated build to include realsense2 driver. You can give a try:...