matlabbe
![]()
matlabbe
Stick to https://github.com/UZ-SLAMLab/ORB_SLAM3/releases/tag/v0.4-beta with this patch https://gist.github.com/matlabbe/f5cb281304a1305b2824a6ce19792e13 for now. They did a lot of API breaking changes between v0.4 and v1.0. Would need to take 1 day or two to...
Hi Kurt, See my answer on this thread for the case we would know the position of the tags or anchors: http://official-rtab-map-forum.206.s1.nabble.com/How-to-improve-mapping-accuracy-based-on-ArUco-identification-code-td8393.html#a8497 Anchors could be treated like markers. You may...
For the original question: 1. You can think about the pose-graph like a network of springs attached each other by some nodes. Each spring has different stiffness (covariance or informative...
rtabmap-databaseViewer shows keypoints that were recorded during mapping. When the robot is standing still, if there are relocalizations happening, the robot may appear jumping at each update (/map -> /odom...
Just followed all instructions of the [tutorial](https://github.com/introlab/rtabmap/wiki/Export-Raster-Layers-to-MeshLab) and it seems to be still working:  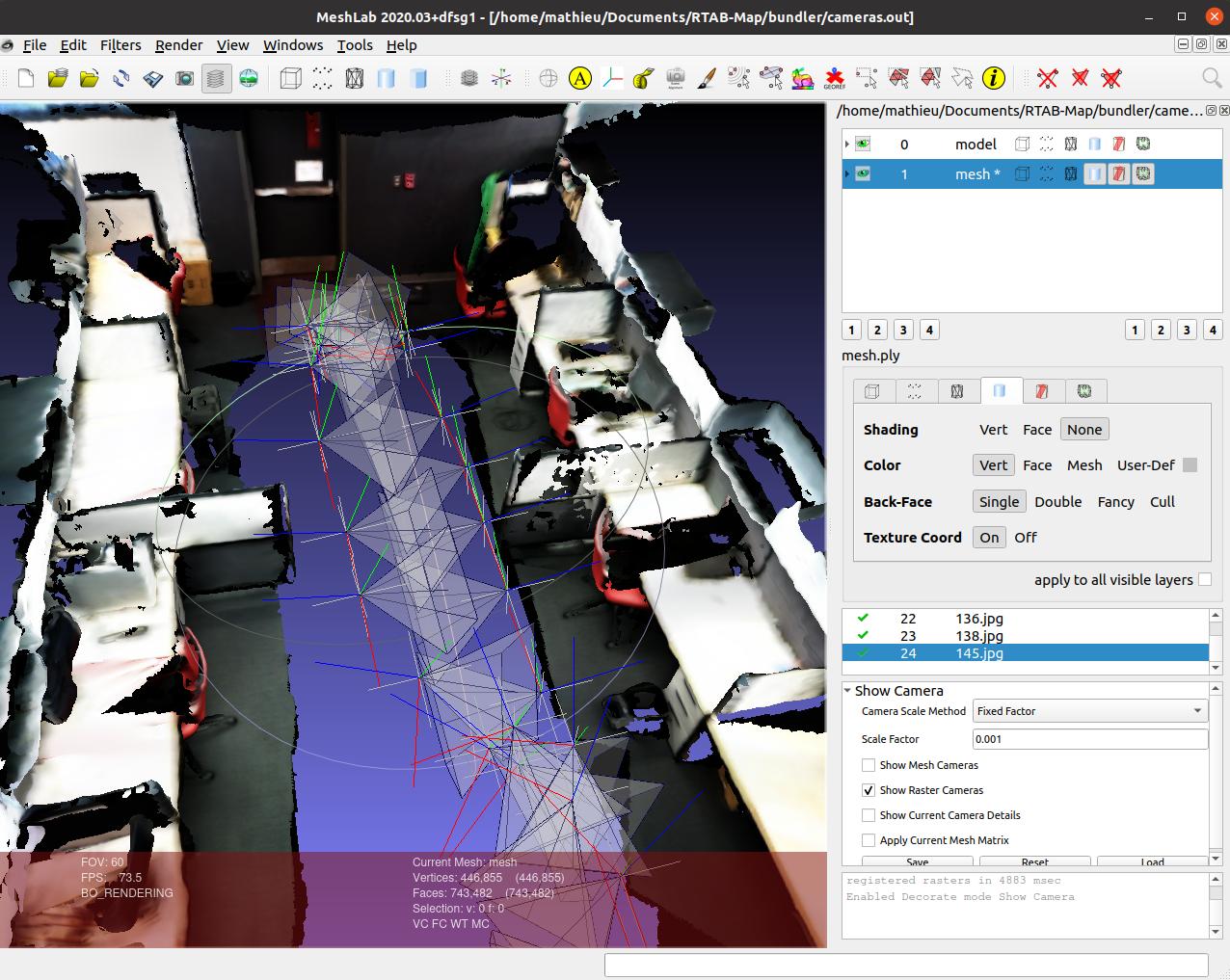 This is on Ubuntu 20.04, Meshlab 2020.03, latest...
I think only 1 image of 30 was kept for the loop closure experiment. The Bovisa dataset has image rate at 30 Hz, but the experiment was done at 1...
flann is failing because of `Can't find pyunit file "test_nn.py"`, don't remember if I just ignored that file by editing flann CMakeLists.txt to not build the test.
Sorry for the delay, had a paper deadline last week. When the mesh is created, it automatically computes the ideal Poisson reconstruction depth based on the dimension of the point...
Can you share the database so we can try the export here to see better the problem?
Put it on a dropbox or google drive, share the link here or send me the link on my email (my username here @ gmail) if you want to keep...