matlabbe
![]()
matlabbe
I don't have crash with the dataset you sent me. Here is the end of the update of the vocabulary with parameters saved in your session 1gb-model.bin (clicking on "update...
I used the same config file. I tested the 4GB dataset, and there was a maximum vocabulary size limitation with how the session was saved and loaded. The code is...
I was not aware of ImagePlay, but it seems using OpenCV stuff under the hood, like Find-Object. Not sure if we could take some code from Find-Object and create a...
Hi, It says "Too low inliers 7 in 43 out", by default it requires 10 inliers to find the homograhy (see `Homography/minimumInliers` parameter). If you move the object toward the...
On the [main page](http://introlab.github.io/find-object/), you can see how many features were matched on the left: 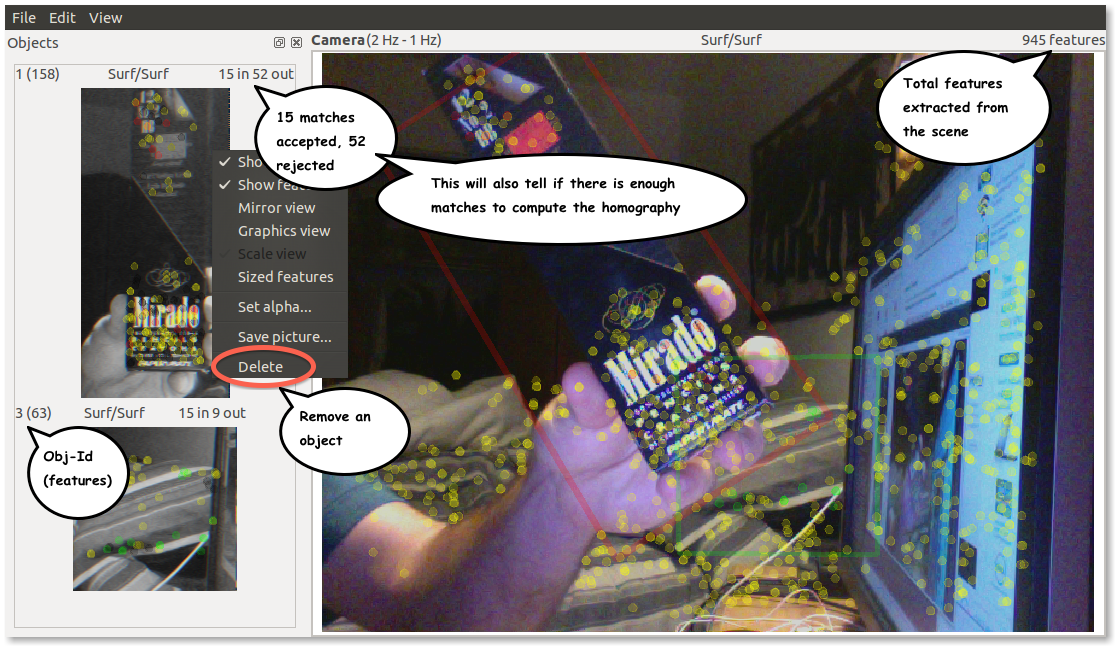
> but I cannot get the Point Cloud display in the Rviz It is more a realsense related issue. For the warning, it means the object is detected but its...
Yes `ros-kinetic-opencv3` package contains SIFT (xfeatures2d module):  You don't have to delete your installed opencv3, unless it is in `/usr/local`. I have both opencv installed from ros and ubuntu...
If you want to use opencv from /usr/local it's ok to build find-object standalone. With ros, this could work too, but be aware that find_object_2d package depends on cv_bridge, which...
Hi, You have to build OpenCV from source (with nonfree module for opencv2 or with opencv_contrib for opencv3), then build rtabmap against this version. As you are using Indigo, I...
I copied/pasted the instructions provided in your link to this [project's README](https://github.com/introlab/find-object). cheers, Mathieu