vonzy
vonzy

It's me again! :) I collect a dataset on android phone, and test with VINS. It performs very well at the beginning, but when huge rotation occurs, vision part fail...
Hello, I am trying porting VINS to Android recently, and I have finished porting VINS-Mobile to Linux cmake version, which was tested successfully with EuRoc_V1_01_easy and EuRoc_MH_01_easy dateset.  Several...
I have tried to calibrate the delay of image, the residual can reach local minimum at a certain value (about -0.2). Is it seems right? 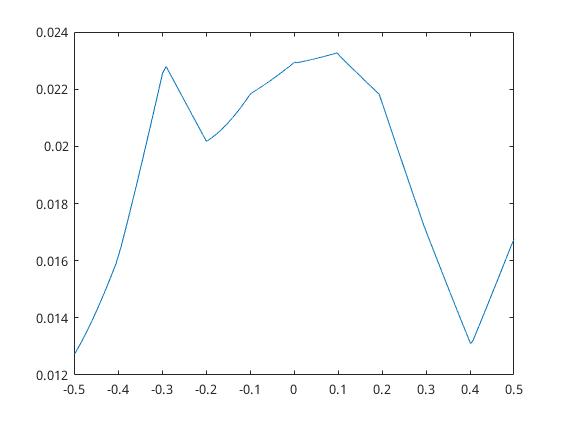 And After I shift...
In VIN-Mobile, the ProjectionFactor::sqrt_info is set to FOCUS_LENGTH_X / 1.5 * Matrix2d::Identity(). It seems the sqrt_info should be two arbitrarily selected orthogonal bases, but why it should be set to...
I am modifying VINS-Mobile to standalone version(none ROS) on ubuntu. When I input the data of EuRoC_V1_01_easy into the program, it can't finish initialization, and gyroscope bias estimated is totally...
recently I try to implement VI-DSO, I notice there are several questions to answer first: 1. whether "dynamic marginalization" is essential? In my view, dynamic marginalization is really a complex...
I notice that if I remove the constrain for these 2 parameters ( set setting_affineOptModeA & B = 0) in DSO,then these 2 parameters drift severely. And if I use...