mapviz

mapviz copied to clipboard
Odometry covariance ellipse not transformed correctly
It looks like the error ellipse has z-coordinates set to zero, rather than to the current odometry message's z-coordinate, such that it can be projected incorrectly such that it is not centered on the current odometry point. See for example:
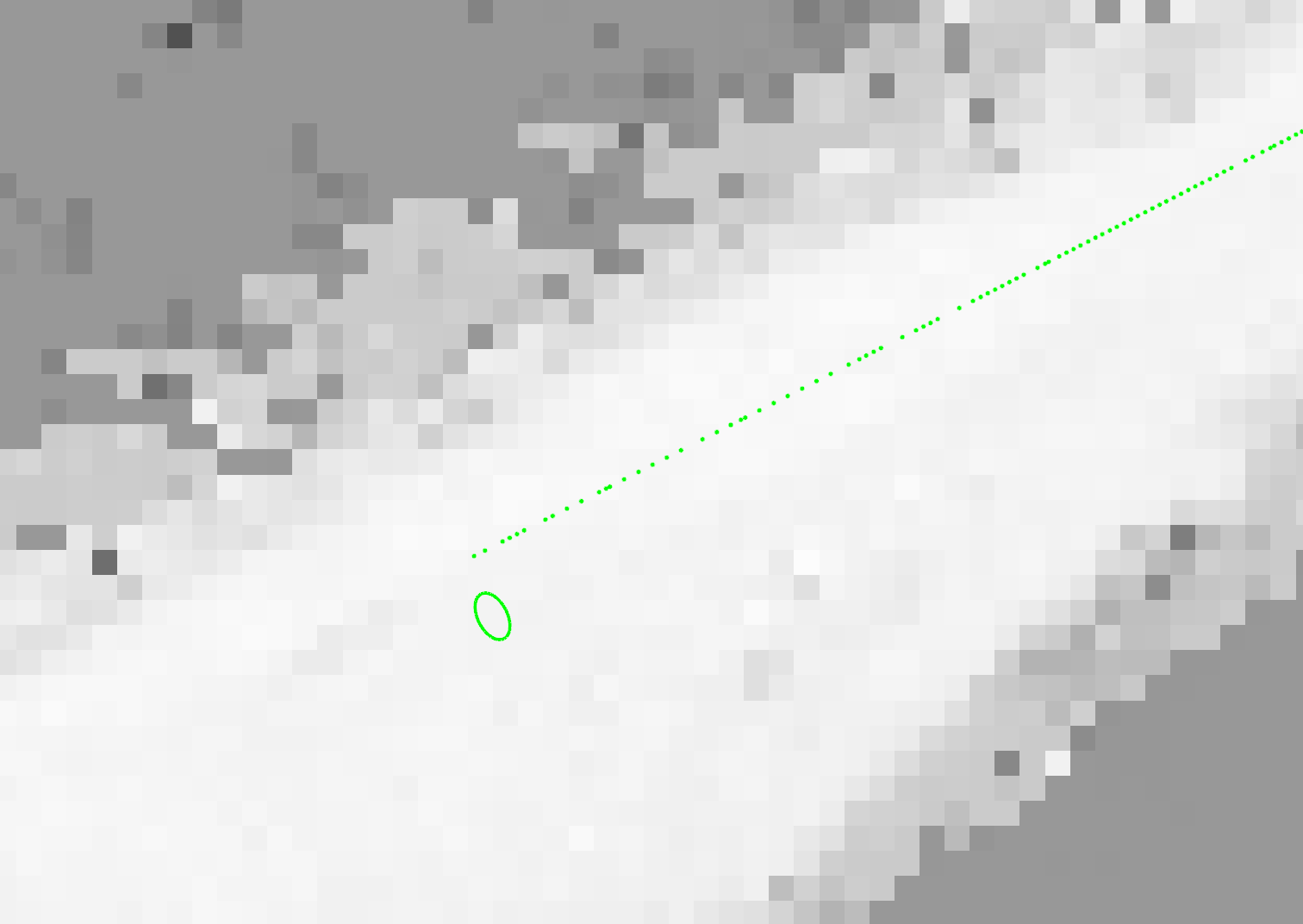
This seems to only be an issue when visualizing in a frame that other than the original odometry frame.
I can take a look at this problem is someone pass me a rosbag to reproduce it
Cheers