sunyuan789
sunyuan789
I have great admiration for the work you do. But when I want to use it to Extract trajectory, I could't find some function I need. Would you please publish...
I bought a probot_g602 robot, but the package in ros2go couldn't support Ubuntu18. I want to download the latest version, But there are nothing in this repo. Could you tell...

**Describe the bug** When installed husarnet with "curl -s https://install.husarnet.com/install.sh | sudo bash", the message shows Failed to enable unit: Unit file husarnet.service does not exist. And the when I...
Starting roscore on Master, and other device which joined could ping successfully. I tried run turtlesim_node on master device, and run turtle_teleop_key on other device. I could advertiese /turtle1/pose, but...
Installed: vcpkg install pangolin Operator System: Windows 11 May be the API code is out of date? Cannot transform vector to pangolin::glDrawVertices 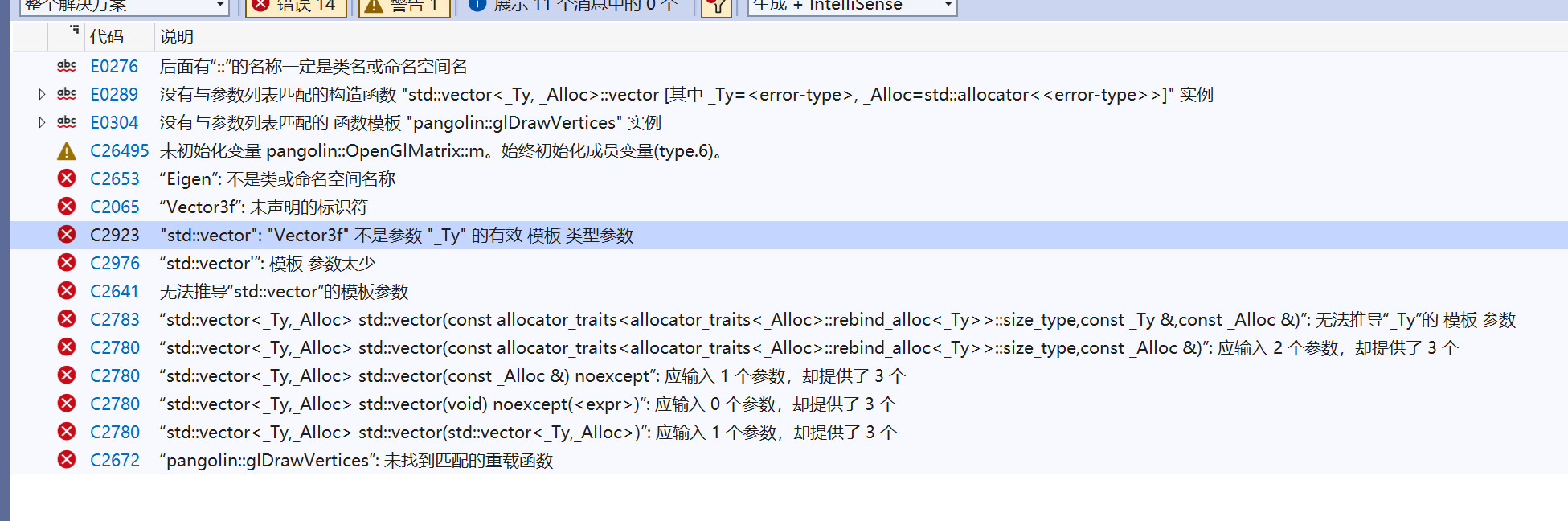
When running your code(gen_video.py), the error arising :pyparsing.exceptions.ParseSyntaxException: Expected '}', found '=' (at char 759), (line:34, col:18). Running python script with `python eval/gen_video.py -n sn64 --gpu_id 0 --split test -P...
During the inference stage, I noticed that a series of parameters need to be passed to opt, including fusion_method. However, the fusion method is already specified during the training stage...
Thanks for sharing the codebase. I have a question: in the paper, how is the bandwidth calculated?