ros_astra_camera
 ros_astra_camera copied to clipboard
ros_astra_camera copied to clipboard
Depth PointCloud and RGB overlay problem with Stereo_S_U3
Hi, I've got a problem with the Stereo_S_U3 that is very restrictive for 3d mapping. If I display those 3 topics into Rviz, they are not stackable : /camera/depth_registered/points /camera/depth_registered/image_raw /camera/rgb/image_rect_color The PointCloud2 topic is really more accurate that the DepthCloud one, but unfortunately it's the second one that I want to use. As you can see on this screen shot, the blue data is the DepthCloud image_raw and the red one is the PointCloud2 points:
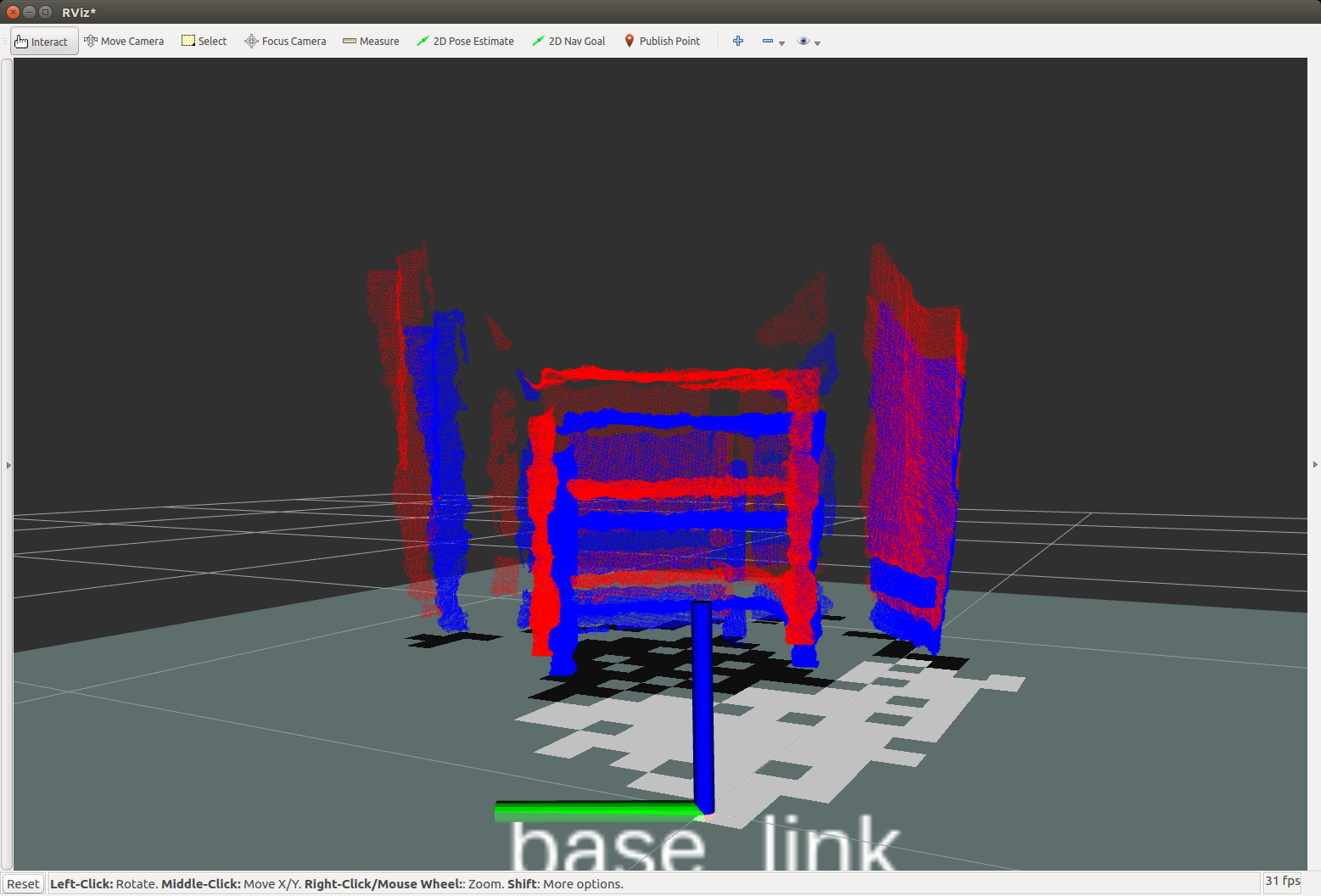
there are about 10cm bias vertically and 5cm horizontally.
If I take a look to the overlay between those both depth data and the rgb (cropped to 640x400 to be consistent with the depth image resolution), I can see:
- an horizontal bias of about 3cm
- image size is not consistent
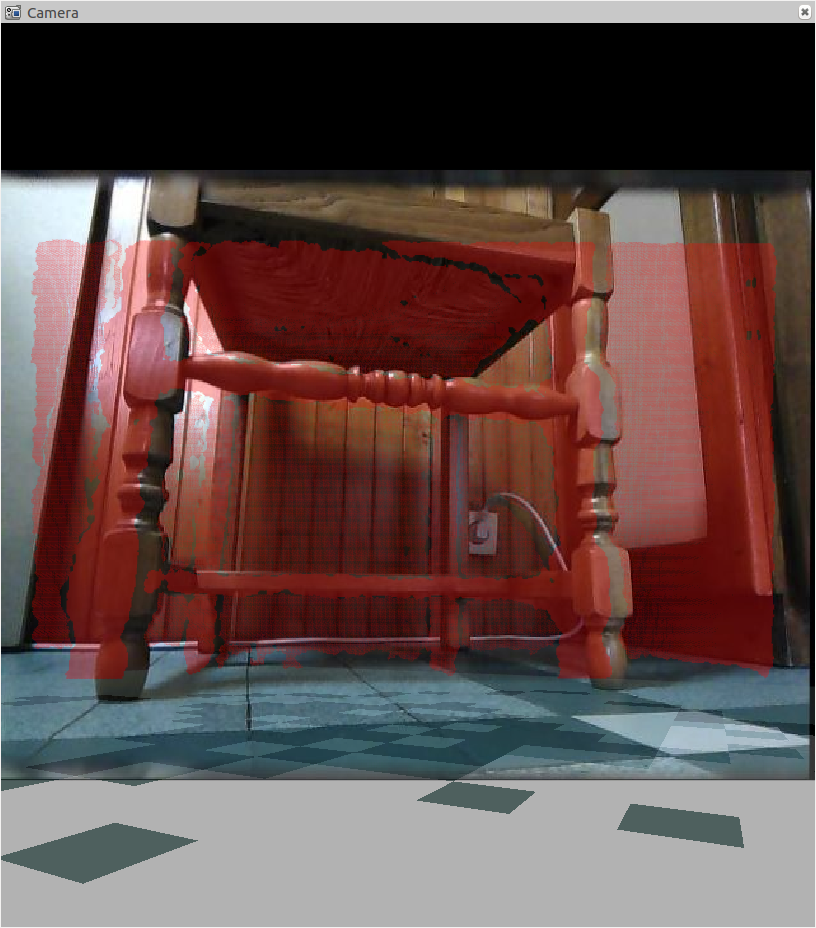
For the depth data it's worst, I can see:
- a vertical bias of about 10 cm
- Image size is not consistent

Previously I worked with an Astra S and there were no problems. Any idea to resolve this problem is really welcome.
thanks
This is also something we reported here: #111 but we did not get any answer