open-source-rover
 open-source-rover copied to clipboard
open-source-rover copied to clipboard
A build-it-yourself, 6-wheel rover based on the rovers on Mars!

Noticed an inconsistency with Arduino Shield connector J5, which connects to mainboard. In [Figure 17](https://github.com/nasa-jpl/open-source-rover/blob/master/Electrical/Latex%20Docs/PCB%20Assembly/img/arduino_sheild_top.jpg) and in the assembly text, notch for this connector is to face OUTWARDS. Later in...
The Servo City HD Premium Gear Motors with encoders have a capacitor acting as a snubber on the encoder board. This capacitor couples the 20kHz PWM voltage from the RoboClaws...
## Problem The attachment scheme for the drive motors leads to a mechanical over-constraint.  Here we can see that the clamping force on the aluminum 25mm Diameter motor clamp...
## Problem There is a mechanical over-constraint imposed by the 0.25 inch clamping hub used to attach the corner wheel assemblies to the corner steering assemblies. 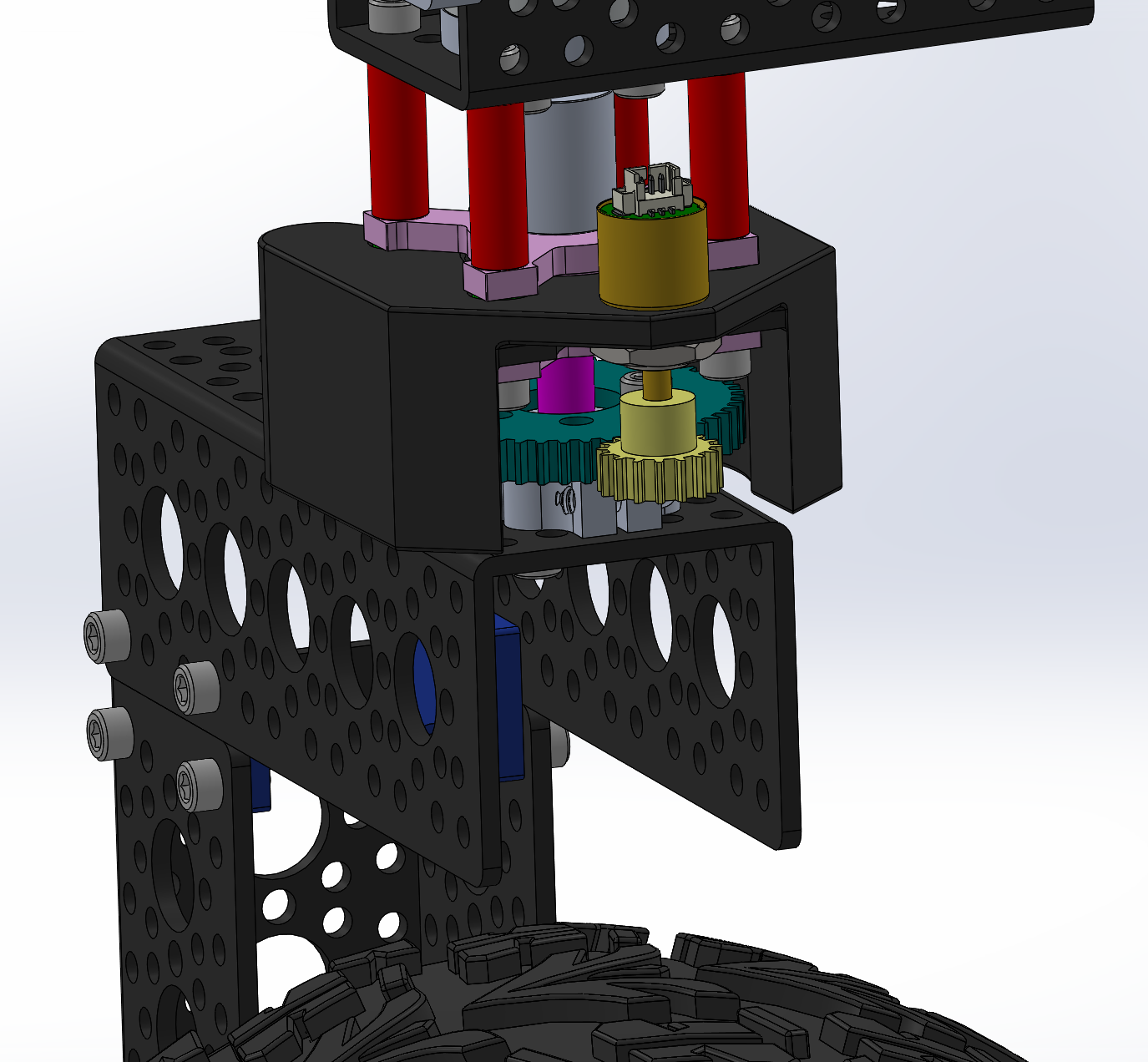 This over-constraint is...
(Related issue: #162 ) In the instruction text for section 1.1.9, parts references do not match their description in Table 10. 1. 6-32 standoffs are not T4. Was T3 intended?...
RE: Electrical Build PDF Figure 9: RoboClaw Motor Assignments Problem A: Text labels "Front" and "Back" on the top-down view diagram are reversed from how PCB Rev E wires them...
Part T11 in the [PCB build doc](https://github.com/nasa-jpl/open-source-rover/blob/master/Electrical/PCB%20Assembly.pdf) is a `4-40 1/2"` hex standoff. The [master parts list](https://github.com/nasa-jpl/open-source-rover/blob/master/parts_list/master_parts_list_raw.csv) specifies it is a `2-56 1/2"` hex standoff instead and the link leads...
Per the conversation over in the [forums](https://www.tapatalk.com/groups/jpl_opensource_rover/what-to-do-when-we-find-issues-t87.html), let's consider this feature request to help reduce obstacles and bring down the barrier to entry for the project. > We want to...
## Problem The absolute encoders used on the corner system are relatively expensive, and also require a voltage scaling solution to convert from the 0-5V analog output signal to the...