Joe Dinius, Ph.D.
Joe Dinius, Ph.D.
But what if the matrix is negative definite? There should be a check before even attempting a matrix rescaling; something like: ``` Eigen::SelfAdjointEigenSolver< Covariance > eigenSolver(this->P); if (eigenSolver.info() != Eigen::SUCCESS...
@MattW86 You can set up derived classes like the following: ```c++ template class YourSystemModel : public Kalman::LinearizedSystemModel { ... // do typedef assignments so that your state type is "S"...
It is probably very late to be referencing this issue, but I have implemented a modification that adds function definitions for the predict and update methods that take a `std::function`...
@frohro thanks for finding this. It looks like I solved a non-numbered problem that is between 2.2 and 2.3 in my book: 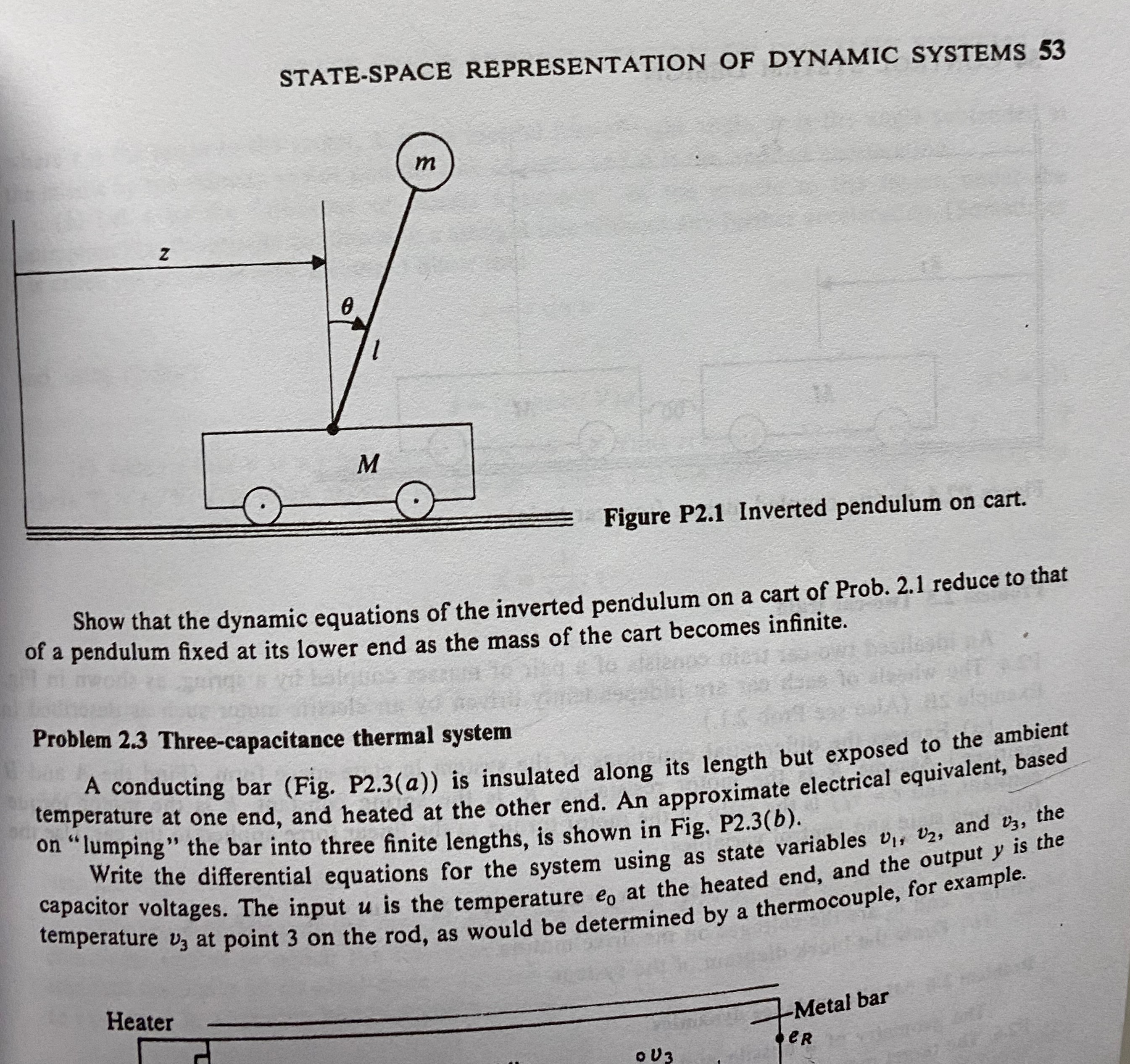 I will add your solution to 2.2...
@frohro I added a solution in the PR listed above. There was a sign difference between your solution and mine, but I think we want the positive sign since derivative...
Perfect. Thanks for the explanation.
FYI - https://github.com/thelink2012/any/pull/25
> FYI - [thelink2012/any#25](https://github.com/thelink2012/any/pull/25) The PR was merged upstream. I'm happy to submit a PR here. Let me know. Thanks!
I may be able to add some additional context here since I just tried (unsuccessfully) to flash an [Recomputer R2021](https://wiki.seeedstudio.com/reComputer_Jetson_Series_Introduction), which uses the Xavier NX dev kit with eMMC. Here...