Chris Anderson
![]()
![]()
![]()
Chris Anderson
Philip, could post the STEP file for that new bracket, too, so we can modify its base to fit different vehicles?
I didn't change anything. Just used the defaults (and it failed with that I2C error)
No, I'm not using a PC9685. I'm using the RC Hat with the pigpio driver
Okay, now I'm totally confused. This is what the myconfig.py file says: 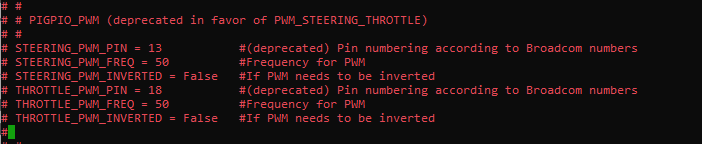 So I did what it said, and used PWM_STEERING_THROTTLE. And then got a lot of I2C (thus...
My config is attached, which is basically just the default. I understand that you're saying you've merged the I2C and GPIO modules, and now I should be specifying those pins...
BTW, making the above change results in a different conflict (now with my I2C OLED screen): 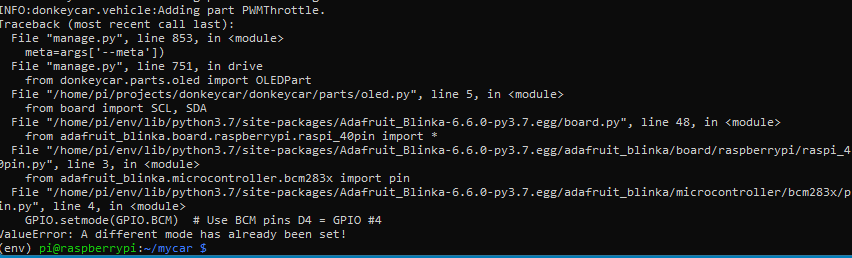
Switching to BCM numbering for the PWM output did resolve the OLED problem, but only the steering pin (BCM 13) works and even it has a very different center position...
We don't actually have a config parameter that specifies which board this is running on. Is there a way we can query the OS to find out? If not, we...
Worth trying that. One way or another we'll have to have a Jetson GPIO solution
@DocGarbanzo That's a weird error. I ran "git config core.filemode false" as suggested but it's still showing the empty files. Does it matter?