Huan Yu
![]()
![]()
Huan Yu
> hei @YuHuan1021 did you run the t265 driver before t265_depth ? what is your fixed reference? I run the realsense-ros package for driving T265: `roslaunch realsense2_camera demo_t265.launch` In rviz,...
> hei @YuHuan1021 did you run the t265 driver before t265_depth ? what is your fixed reference? Maybe I should build one **tf** between **t165_depth** to **camera_odom_frame**?
To add a **tf**: `rosrun tf static_transform_publisher 0 0 0 0 0 camera_link t265_depth 10`, then the problem is solved. But the pointclouds look so bad. Are they normal? 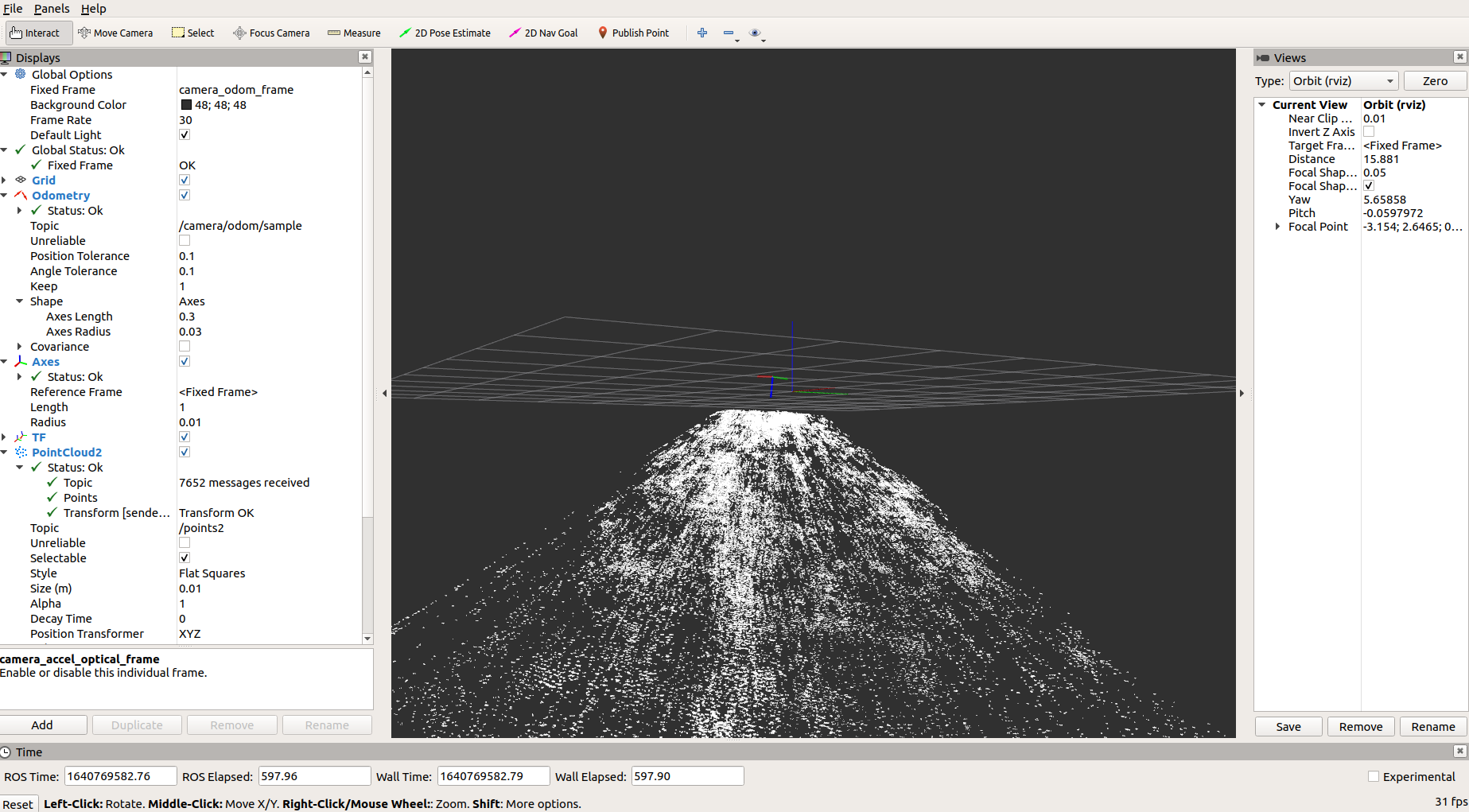 > > 你好!@YuHuan1021 我看到你的形象。点云似乎在 z 轴上, 这是正确的吗? 和我的方法一样 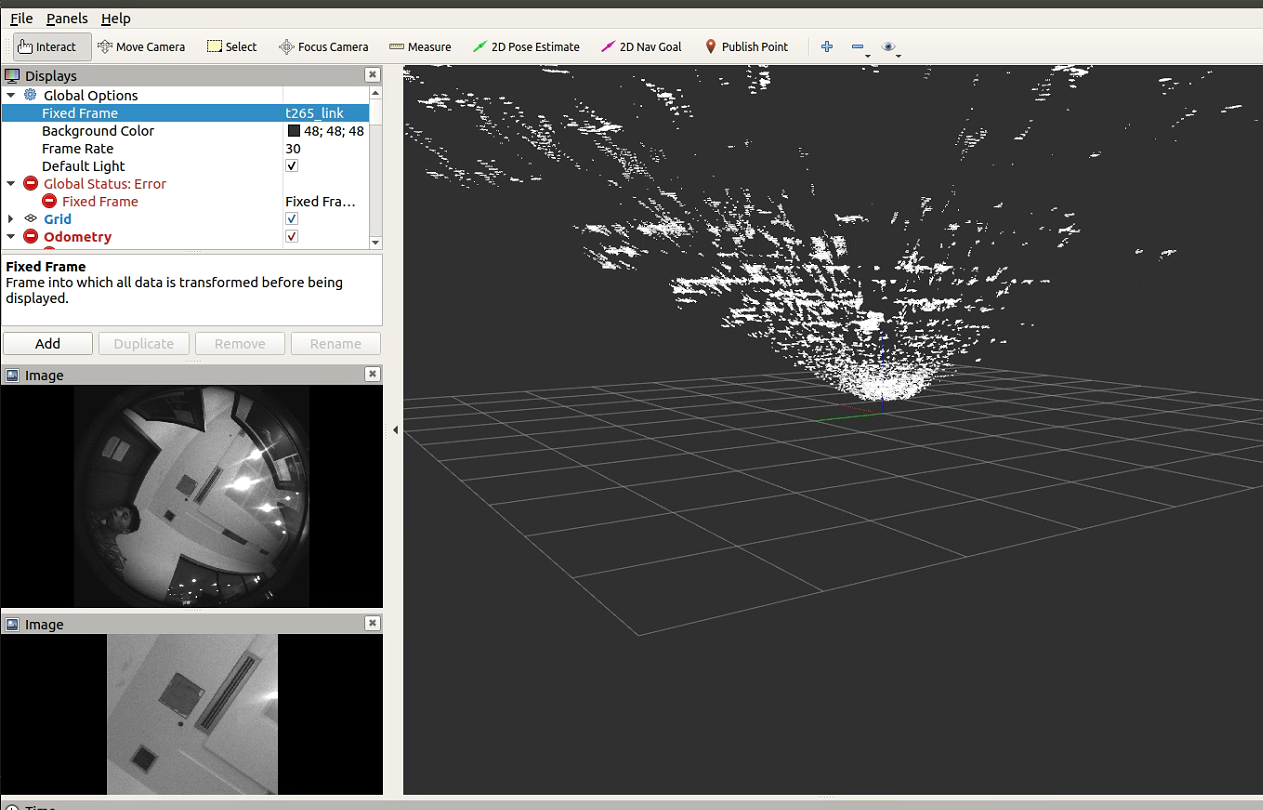 Sorry, I haven't continued this...