t265_depth
 t265_depth copied to clipboard
t265_depth copied to clipboard
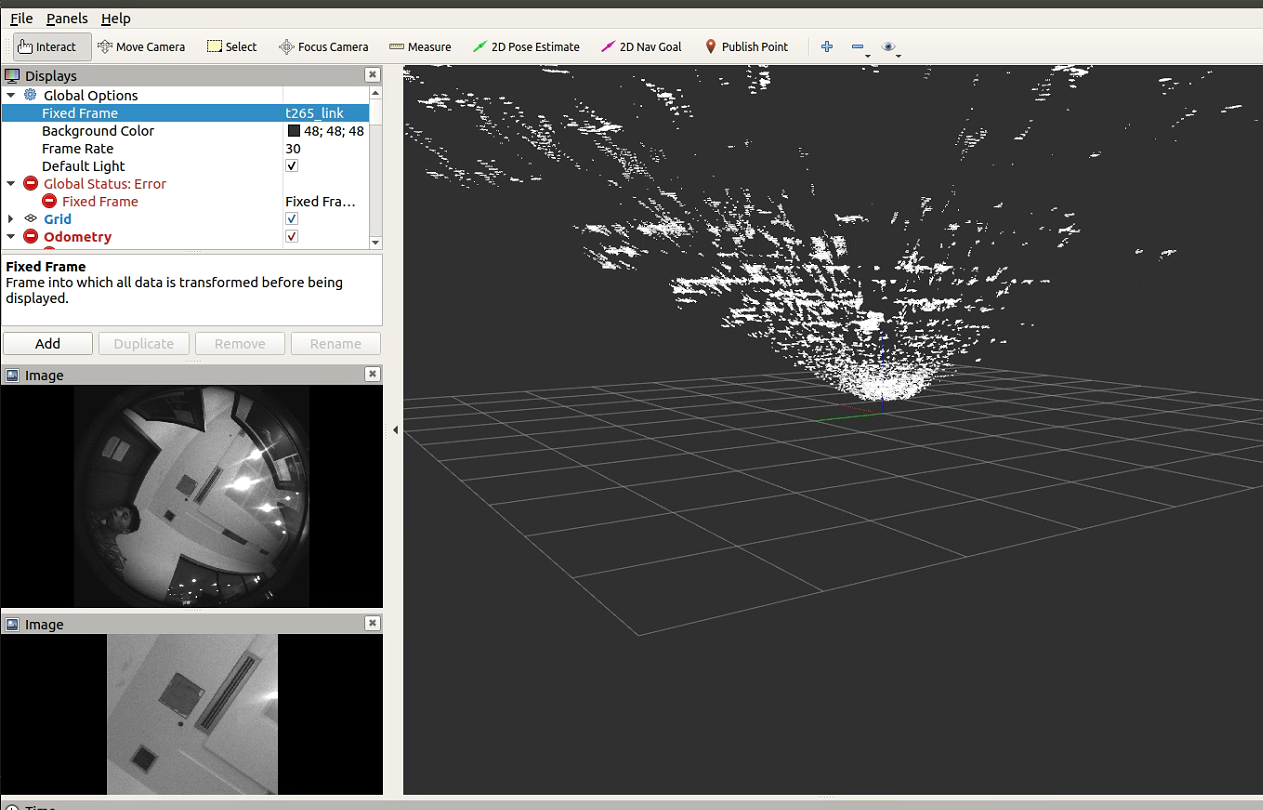
For frame [t265_depth]: Frame [t265_depth] does not exist
Hi!
Your work is great! But when I run roslaunch t265_depth t265_depth.launch, everythng is OK except the error in rviz:
For frame [t265_depth]: Frame [t265_depth] does not exist
How can I solve it?
Thanks!
hei @YuHuan1021 did you run the t265 driver before t265_depth ? what is your fixed reference?
hei @YuHuan1021 did you run the t265 driver before t265_depth ? what is your fixed reference?
I run the realsense-ros package for driving T265:
roslaunch realsense2_camera demo_t265.launch
In rviz, the fixed frame is camera_odom_frame.
hei @YuHuan1021 did you run the t265 driver before t265_depth ? what is your fixed reference?
Maybe I should build one tf between t165_depth to camera_odom_frame?
To add a tf: rosrun tf static_transform_publisher 0 0 0 0 0 camera_link t265_depth 10, then the problem is solved.
But the pointclouds look so bad. Are they normal?
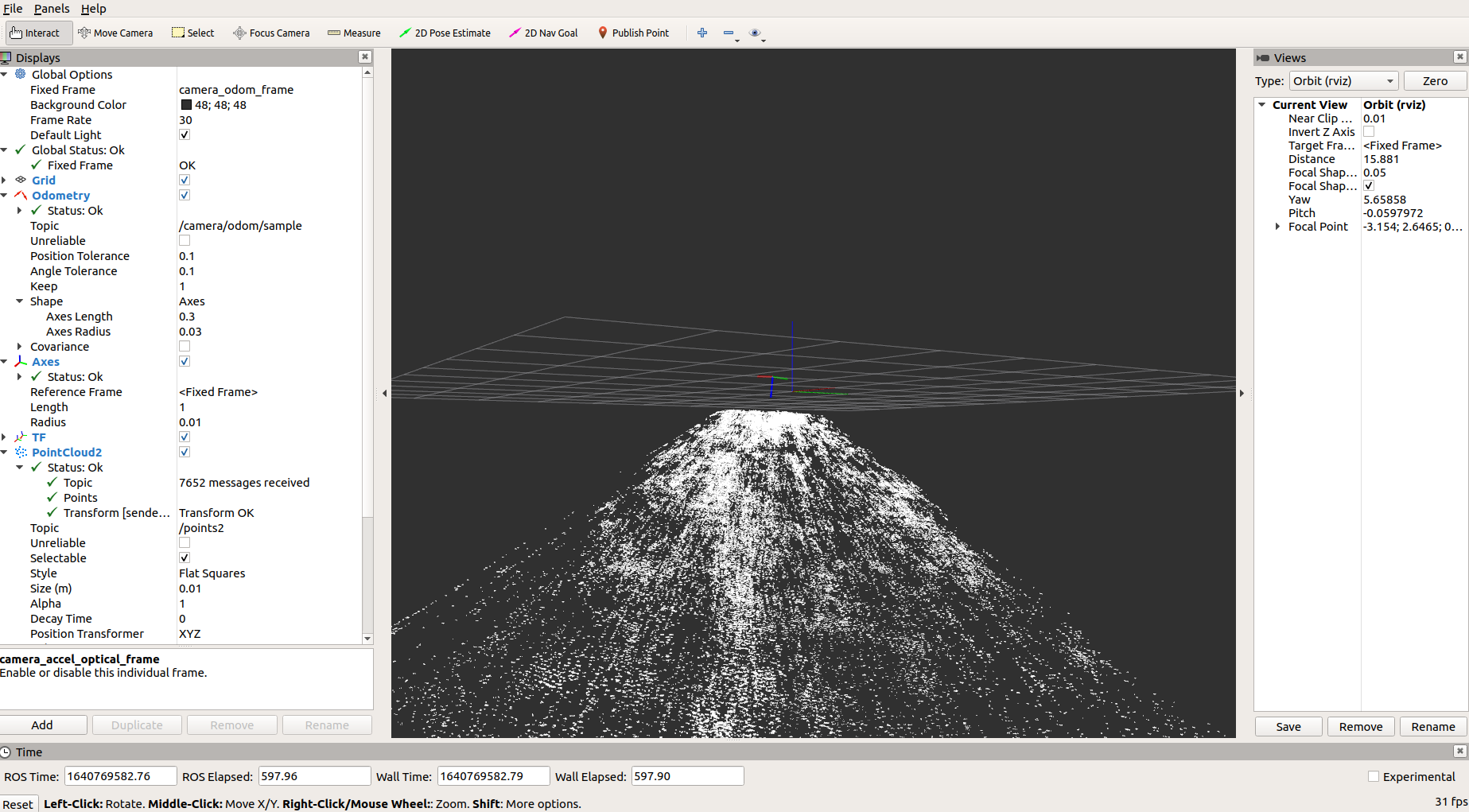
do not expect to use this to have a 20m map of the environment lol it should be used for max 4/5m depending on the features you are point to did you put you intrinsics in the yaml file? also check your resolution
did you put you intrinsics in the yaml file? also check your resolution
Oh, I didn't check the yaml file. I will try. Thanks so much!
Hi! I have made sure the yaml file is correct, but it's still the same as the picture I commented before. What about your show? @tiralonghipol
maybe this package does not fit your application? what are you trying to achieve? to get a decent pcl with fisheye stereo block matching is very hard the best result I ever got is summarized in this video: https://www.youtube.com/watch?v=LcsuX1bwI_8 check the top right around 0:23 and so forth
To add a tf:
rosrun tf static_transform_publisher 0 0 0 0 0 camera_link t265_depth 10, then the problem is solved. But the pointclouds look so bad. Are they normal?
Hi! @YuHuan1021
I see in your image. the pointcloud seem to at the z axis
Is this correct?
It's the same to my method
To add a tf:
rosrun tf static_transform_publisher 0 0 0 0 0 camera_link t265_depth 10, then the problem is solved. But the pointclouds look so bad. Are they normal?Hi! @YuHuan1021 I see in your image. the pointcloud seem to at the z axis Is this correct? It's the same to my method
How used the package to generate the depth image? Is it one terminal executes the command "roslaunch realsense2_camera rs_t265.launch",and another terminal executes"roslaunch t265_depth t265_depth.launch"? then ,Do you not modify other parameter?
添加一个tf :
rosrun tf static_transform_publisher 0 0 0 0 0 camera_link t265_depth 10,然后问题就解决了。但是点云看起来很糟糕。他们正常吗?你好!@YuHuan1021 我看到你的形象。点云似乎在 z 轴上, 这是正确的吗? 和我的方法一样
Sorry, I haven't continued this project for a long time and I forget how to proceed. X﹏X
you need to get your intrinsics parameters using the provided realsense api as specified in the readme being based on stereo block matching, do not expect good depth as a d455 I created this package simply to minimize weight onboard my robot and have odometry + depth from the same sensor a better solution would be use the d435 or d455 to get depth and use one of the camera + imu to run vio (Fei Gao's style, just to mention one)