cv-detect-robot
 cv-detect-robot copied to clipboard
cv-detect-robot copied to clipboard
🔥🔥🔥🔥🔥🔥Docker NVIDIA Docker2 YOLOV5 YOLOX YOLO Deepsort TensorRT ROS Deepstream Jetson Nano TX2 NX for High-performance deployment(高性能部署)
经过排查,发现这个写入文件的,这句话,导致:bus error (core dumped) memcpy(guo, file_txt,boundingboxes_len); // put the char[] into txt-file 请问,有什么解决方法吗?
当运行测试时出现错误 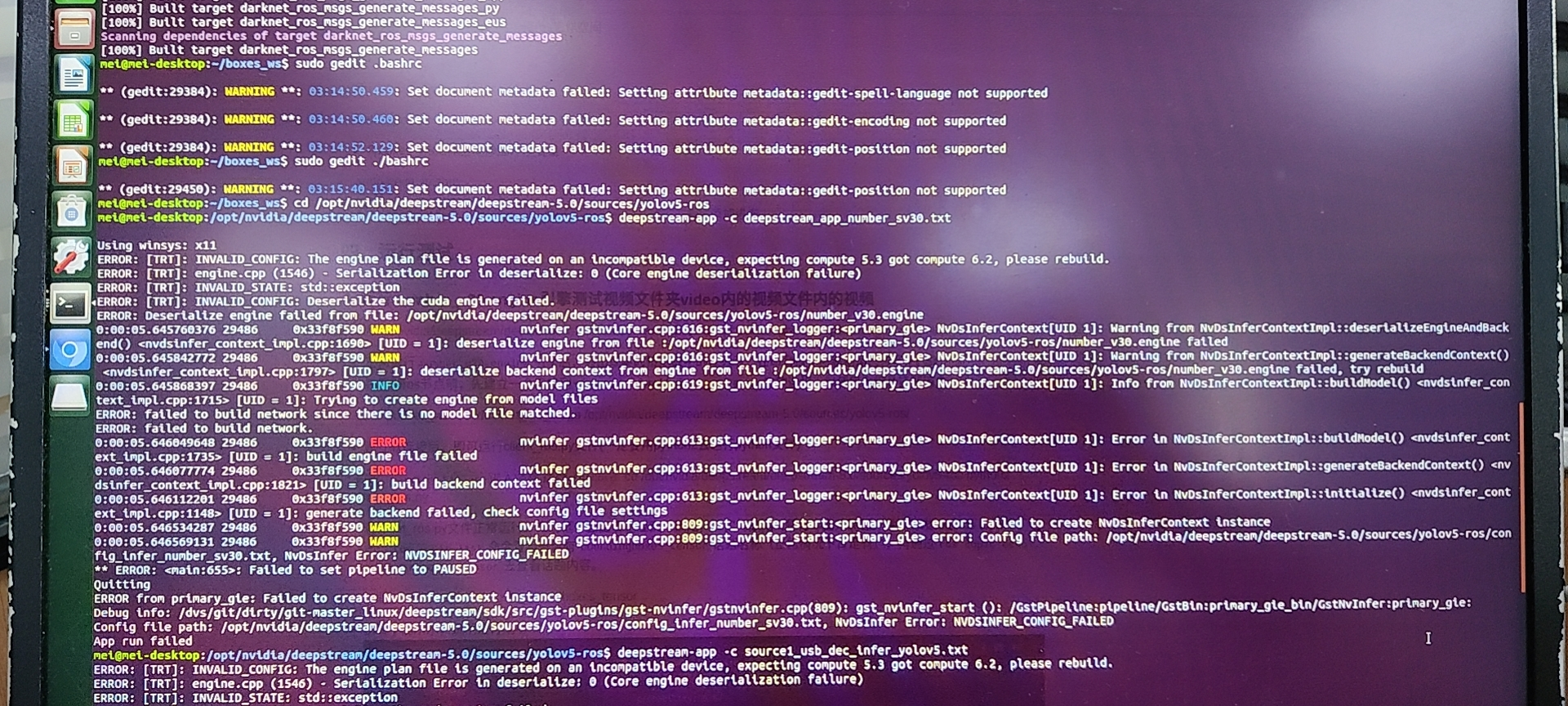 并且博主在第三点中说明可通过number_v30.pt生成新的number_v30.engine引擎文件,请问这一步怎么实现呢,谢谢
软链接出错

你好,当我运行到软链接一步时,之后运行client_ros.py时,出现错误:no module named darknet_ros_msgs.msg 这是怎么回事呢,在yolov5-ros下已经有darknet_ros_msgs文件夹,里面有msg文件夹。谢谢
运行sudo docker run -it --net=host --device=/dev/video0 -e QT_X11_NO_MITSHM=1 --gpus all --name="tracker1" --privileged=true -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY -w /opt/nvidia/deepstream/deepstream-6.0 gjy123456/cv-detect-robot:CDR-jetson-v4.18 /bin/bash 报错: docker: Error response from daemon: failed to create shim:...
Metadata
Owner
Metadata
🔥🔥🔥🔥🔥🔥Docker NVIDIA Docker2 YOLOV5 YOLOX YOLO Deepsort TensorRT ROS Deepstream Jetson Nano TX2 NX for High-performance deployment(高性能部署)