boonflies
boonflies
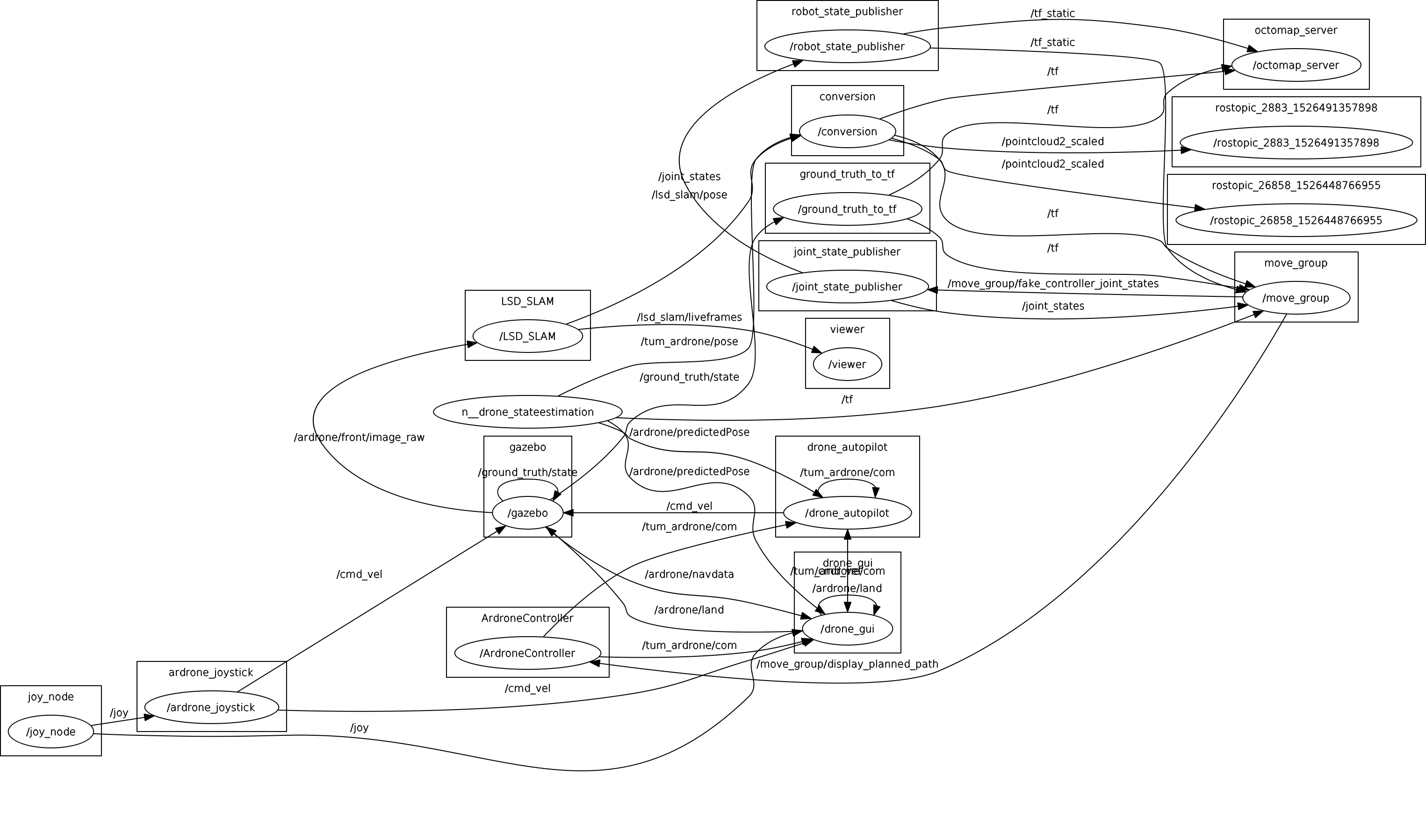
can you please share a tf model of the entire setup?
I could create maps with TUM_Simualator but when I use the real AR.Drone 2.0 i am facing this issue.
Hi, After locking the point cloud, i get "made animation with 0 keyframes, spanning 0.000000 s!' and then I flush the point cloud to pc_tmp.ply, i tried to launch demo.launch...
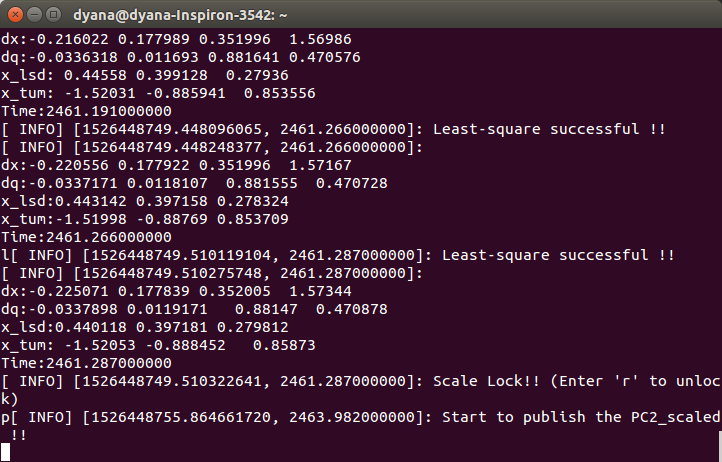
Thanks, I tried pressing "l" and "p" in the conversion node and yes I got the following printed on the terminal, _l[ INFO] [1526447183.019686002, 1763.820000000]: Least-square successful !! [ INFO]...
  I am not getting, _pointcloud_CB publishing Scaled Point_Cloud2_ in my conversion terminal as seen in the image posted by @axelfar in the comment above.
Yes, you are right. when I try to "rostopic echo /pointcloud", nothing is published. I have used lsd_slam package provided inside third parties folder and I have these two lines...
Can, using /image_raw instead of /image_rect (in the absence of messages in /ardrone/front/camera_info) be the reason for /pointcloud not publishing? How to start getting messages in /ardrone/front/camera_info so that /image_proc...
I redownloaded the lsd_slam package. when I tried to rosrun the lsd_slam_core node, I get segmentation fault, _rosrun lsd_slam_core live_slam /image:=/ardrone/fnt/image_rect camera_info:=/ardrone/front/camera_info ... **Segmentation fault (core dumped)**_ I found that...
@axelfar thanks, i calibrated my camera, and then set the following values in video.h, #define D2_STREAM_WIDTH 640 #define D2_STREAM_HEIGHT 352 Now, the debug window looks fine, and the ros node...
@axelfar, thanks. My keyframedisplay.cpp looks the same. I wondered, if there was some discrepancy in build, so I cleared the workspace, and with keeping only the hypharos related files, I...