pilz_industrial_motion
 pilz_industrial_motion copied to clipboard
pilz_industrial_motion copied to clipboard
Industrial trajectory generation for MoveIt!.

Hi, I am trying to implement the pilz industrial motion planner on my robot arm which runs in moveit! I have added the line: to my moveit_planning_execution.launch file, but they...
Hi, I'm succesfully able to move a robot with moveit and pilz pipeline, but what if i have to plan the motion of multiple robot? Because a can launch moveit...
I have been trying to use pilz robot programming with Staubli robots and failed eventually. So wanted to know what are the steps to use the code with Staubli robots...
## Description Just removing some duplicate code. (backport) ### Things to add, update or check by the maintainers before this PR can be merged. * [x] Public api function documentation...
## Description These changes fix the termination of a program on calling `Robot._release()` twice. (backport from noetic-devel) ### Things to add, update or check by the maintainers before this PR...
## Description Some group joint model groups may not have any active joints, this seams counter intuitive but its common to have a group for an end effector which may...
a tiny step towards noetic compatibility Note: This needs https://github.com/ros/rosdistro/pull/26778 as prerequisite.
PR to investigate if it possible to use the universal robot ur3 in combination with the `pilz_command_planner`. This PR is based on issue #314.
Target: #311 Looks promising, but needs more investigation. The pictures below show that the oscillations at the acceleration-part of the LIN trajectory are dissolved. Before: 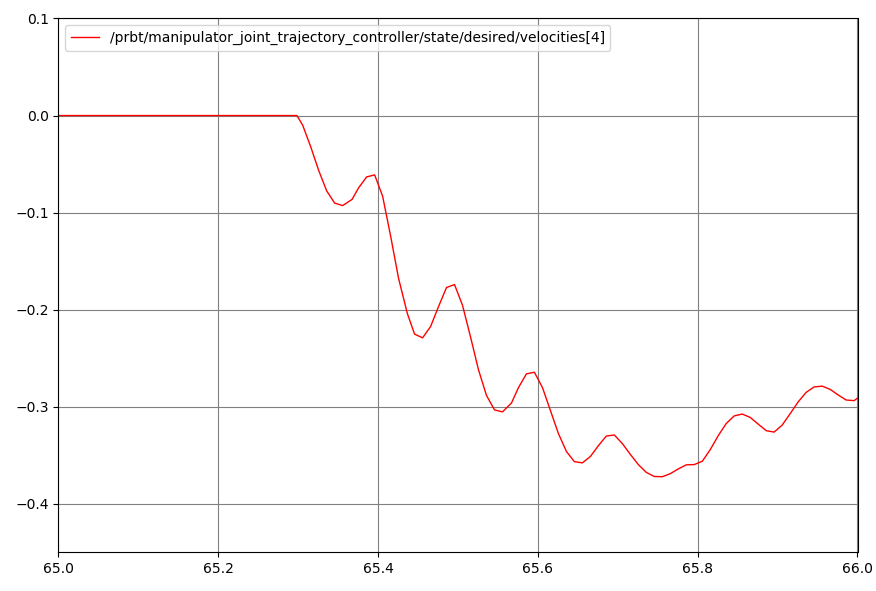 After: 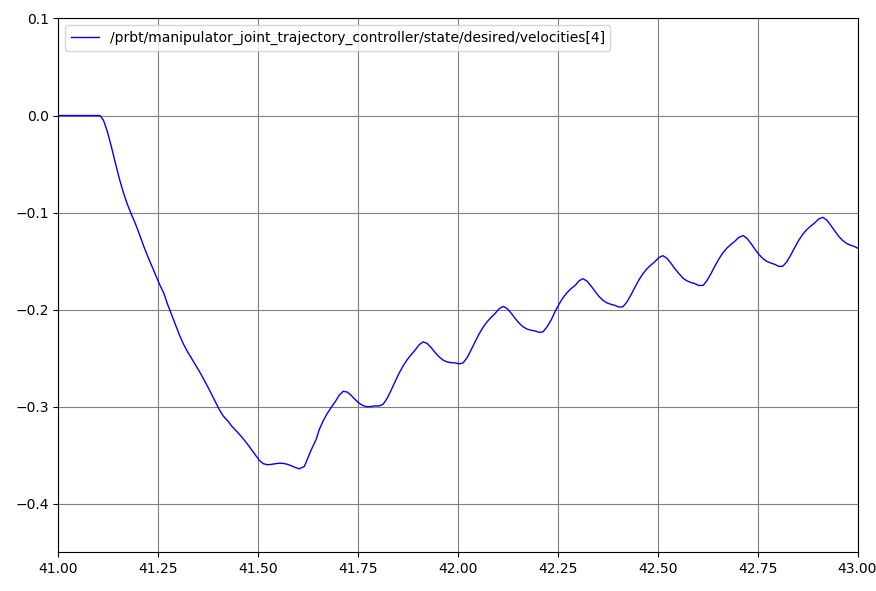
This PR fully automates the acceptance test: `acceptancetest_test_move_ctrl.py` using the PILZ test facility. To run the acceptance test using the PILZ test facility, first start the ROS system via: ```...