刘建林
IP_basic is used to get dense point cloud. Then we project those 3D object points to have 2D segmentation. kangpl 于2019年11月5日周二 上午12:58写道: > Hi JenningsL, > > Thanks for your...
Sorry for the late reply. It is to reduce memory footprint when the dataset is large, especially for point cloud with RPN feature. Of course, you can load the whole...
Yes, I use TITAN V with 12G memory. It's enough for batch size=4.
Is this problem solved now?
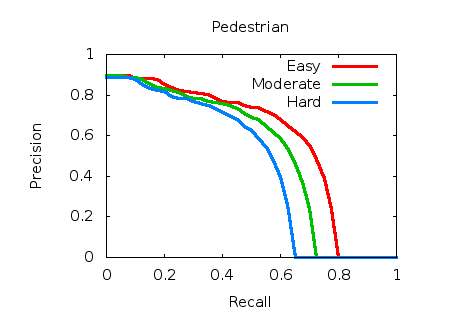 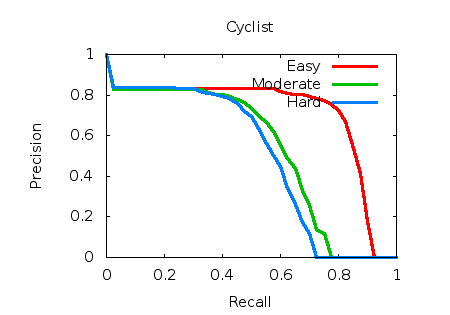 The recall-precision curve are provided for your reference.
Same problem here.