Fabrice noreils
![]()
![]()
Fabrice noreils
@Jaeyoung-Lim Ah interesting I will dig into it:)
@Jaeyoung-Lim I read the two articles you mentioned to understand how you implemented the geometric controller and I have few questions: in `void geometricCtrl::computeBodyRateCmd(bool ctrl_mode)` `a_rd = R_ref * D_.asDiagonal()...
@Jaeyoung-Lim great explanations! Yes it helps a lot to clarify the points which were unclear to me... and it confirms that implementing a geometric controller on a real drone is...
@tiagonovo0 sorry to bother you but I would like to know if the depth point cloud was working "out of the box" or did you need to calibrate the MYNT...
@mirellameelo thank you for your message. Actually I built a launch file and I am able to run the stereo as it is shown below: 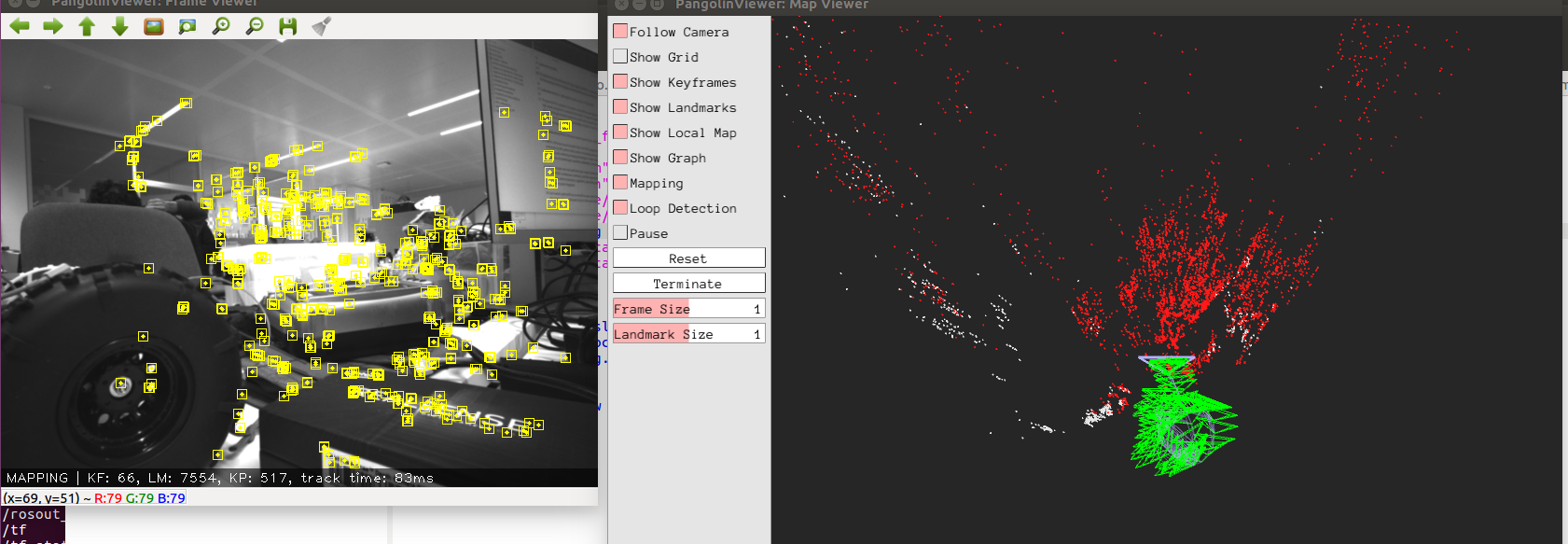 But...
@mirellameelo I looked at the way the odometry has been computed and I have few questions: - The homogeneous matrix which is returned by `auto cam = SLAM_.feed_stereo_frame(leftcv, rightcv, timestamp,...
Hi Sikang Thank you very much for your answers, I will first understand the code and if I have other questions, I will post them. Thanks again Fabrice
@ilitev Sorry to bother you but may I ask you how did you increase the IMU data rate at 180Hz? I am running PX 1.13.2 on a Pixhawk 6X mini...
Hello, you mean this one: ``` (lerobot) fabrice@fabrice-XMG:~/lerobot$ python -m lerobot.calibrate --robot.type=so101_follower --robot.port=/dev/ttyACM0 --robot.id=follower Move follower SO101Follower to the middle of its range of motion and press ENTER.... Traceback (most...
Ah yes this time it works and I was able to calibrate the follower. BUT now confident it work smoothly for the leader I got the message (I was too...