Kalman-and-Bayesian-Filters-in-Python
 Kalman-and-Bayesian-Filters-in-Python copied to clipboard
Kalman-and-Bayesian-Filters-in-Python copied to clipboard
Kalman Filter book using Jupyter Notebook. Focuses on building intuition and experience, not formal proofs. Includes Kalman filters,extended Kalman filters, unscented Kalman filters, particle filters...

For this exercise the solution is given as: ```python def gen_data(x0, dx, count, noise_factor, accel=0.): zs = [] for i in range(count): zs.append(x0 + accel * (i**2) / 2 +...
In cell 22 of chapter 8, x and y are given in meters and a conversion to feet is done via H. However, in cell 24 the variances of the...
Is there any plan to include the explanation of cubature kalman filter to the book ? I see that there's an implementation on the filterpy repository but no section of...
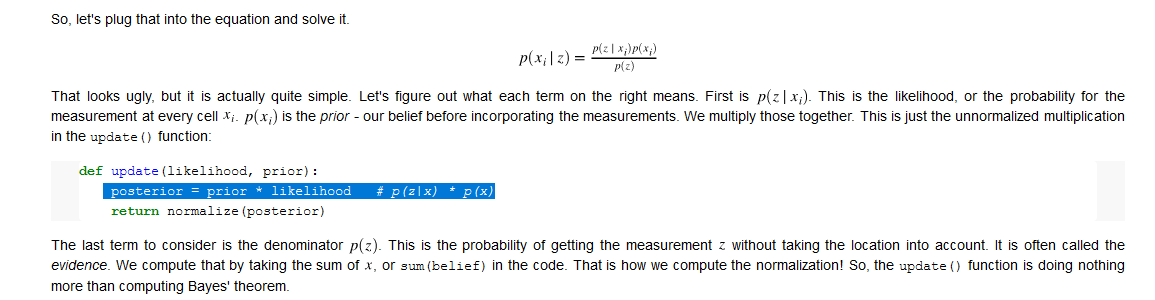 The order of terms in the comment should be `p(x)* p(z|x)` This is in the section explaining Bayes Theorem
In sec 7.4 of the pdf version of the book we get this equation, with the term (x-x) that does not make sense  would benefit from small arrows between a blue estimate in t and a red prediction in t+1. because the blue dots are connected, and so are...
> Perhaps a more reasonable assumption would be that one person made a mistake, and the true distance is either 10.2 or 9.7, but certainly not 9.95. Surely that is...