gym-pybullet-drones
 gym-pybullet-drones copied to clipboard
gym-pybullet-drones copied to clipboard
How to use multiple process calculate controller?
Hi,
I'm using dozens of drones in simulation, and the "computeControlFromState" takes a lot of time. I tried the Process from multiprocessing but got errors.
So, I would like to know how to make the for loop below run in parallel and speed up the code.
ctrl = [DSLPIDControl(drone_model=DroneModel.CF2X) for i in range(num_drones)] # Initialize "num_drones" controllers
for i in range(num_drones): # Compute control for each drone
action[str(i)], _, _ = ctrl[i].computeControlFromState(control_timestep=env.TIMESTEP, state=obs[str(i)]["state"], target_pos=TARGET_POS)
Thank you.
Hello @Wan-ZL,
Process or binding a C implementation would be my first guesses to try and speed-up independent computational blocks. Do you perhaps want to fork the repo, open a PR with your multiprocessing implementation and we can see where the errors are coming from?
Hi @JacopoPan,
I forked the repository and here is the link: https://github.com/Wan-ZL/gym-pybullet-drones
Under the examples folder, I created an example called 'fly_parallel.py' which is the copy of the 'fly.py' but replace the single process PID control part (line 177 in fly_parallel.py) to the multi-process PID control (line 164 in fly_parallel.py).
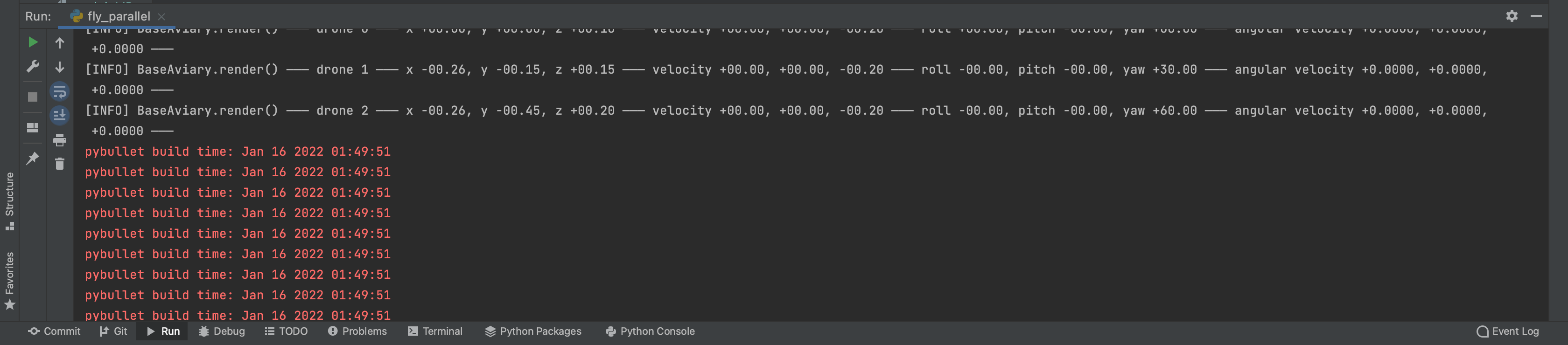
The code doesn't raise any error but PyBullet GUI is frozen and the pybullet keeps printing the "pybullet build time: Jan 16 2022 01:49:51" as shown below
So, how to solve this issue? Or do you have other way to make PID control function (action[str(i)], _, _ = ctrl[i].computeControlFromState()) run in parallel?
Thank you!
Hi @Wan-ZL,
sorry for the delay but I was busy with a few other tasks, the multiple prints of pybullet build .. I suspect come from the different processes importing pybullet on their own (as it is an import in class `DSLPIDControl but really only for a couple of Euler/quaternion operations at the very beginning and very end: they could could be factored out as well)
My suggestion is to take the following 2 steps:
- debug your (multiprocess, not multi-threaded) parallelism replacing the control method with a dummy function
- re-factor
DSLPIDControl.computeControl()as purely functional (also returning and re-accepting its internal state)