taogashi
![]()
![]()
taogashi
`pcl::GeneralizedIterativeClosestPoint` contributes a lot...Try `pcl::IterativeClosestPoint` or `pcl::IterativeClosestPointWithNormals`, there's a tradeoff between speed and accuracy.
The same for `getIndex(position, index)`. This is the Gperftools result: 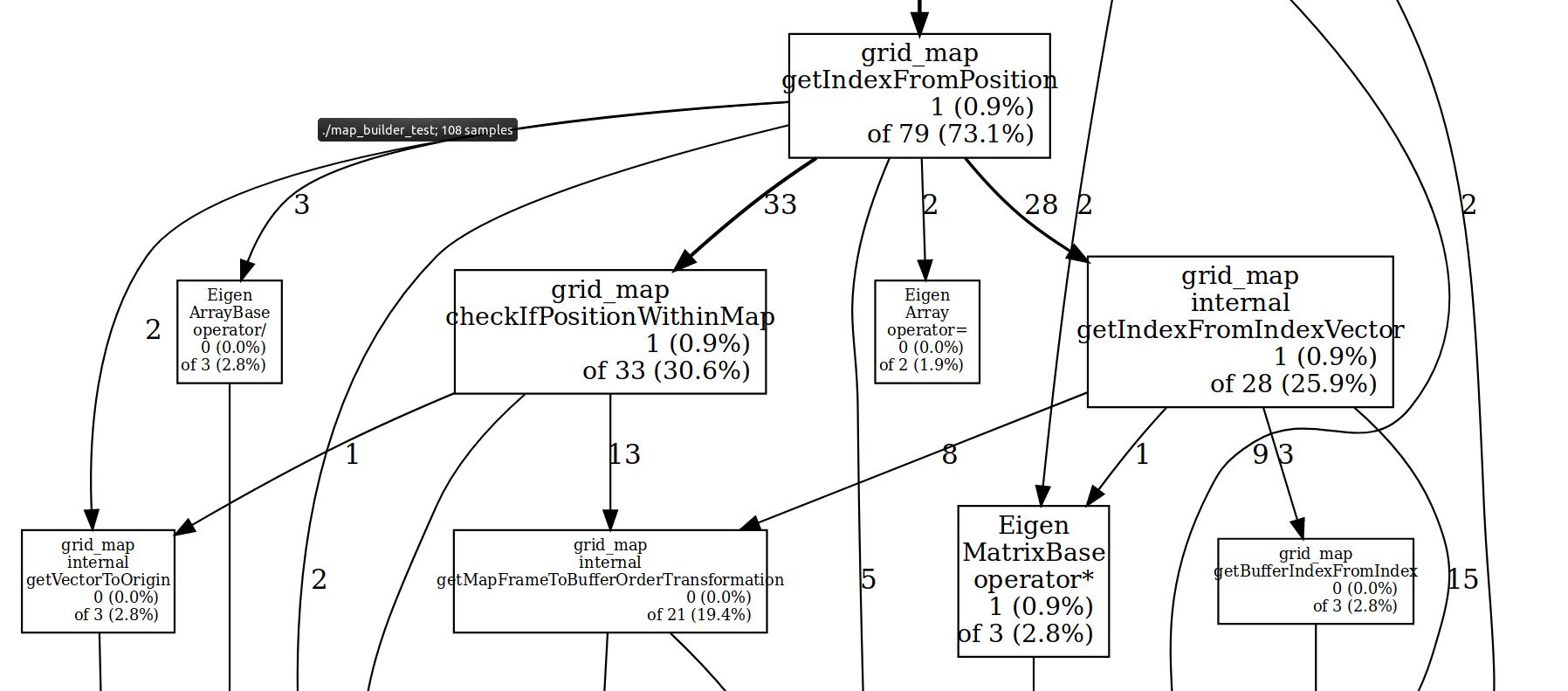
@inspirit `coreNKfs()` only finds nearby keyframes, while this may improve a little, but I think it's better to store a set of last common frames.
1. make sure svo finds the right topic. Use **rostopic list** to check the exact image topic name, usally **/usb_cam/image_raw**. If it doesn't match the one svo wants, you should...
it shows you have no image topic published. you can take the .bag file offered by cfo for test purpose, which suites the defualt camera parameters. `rosbag play xx.bag` and...