rclcpp
 rclcpp copied to clipboard
rclcpp copied to clipboard
Component container fail unexpected
I encounter this problem/bug with the component CLI not sure what cause the issue so the title may not be correct.
Bug report
- Operating System:
- Ubuntu 20.04
- Installation type:
- binaries
- Version or commit hash:
- foxy
- DDS implementation:
- Fast-RTPS
- Client library (if applicable):
- rclcpp
Steps to reproduce issue
The issue can be reproduce with the demo code of rclcpp_component. When execute following command:
1st terminal: ros2 run rclcpp_components component_container
2nd terminal:
ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
ros2 component unload /ComponentManager 1
ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
ros2 component unload /ComponentManager 2
Expected behavior
The component should load and unload as normal
Actual behavior
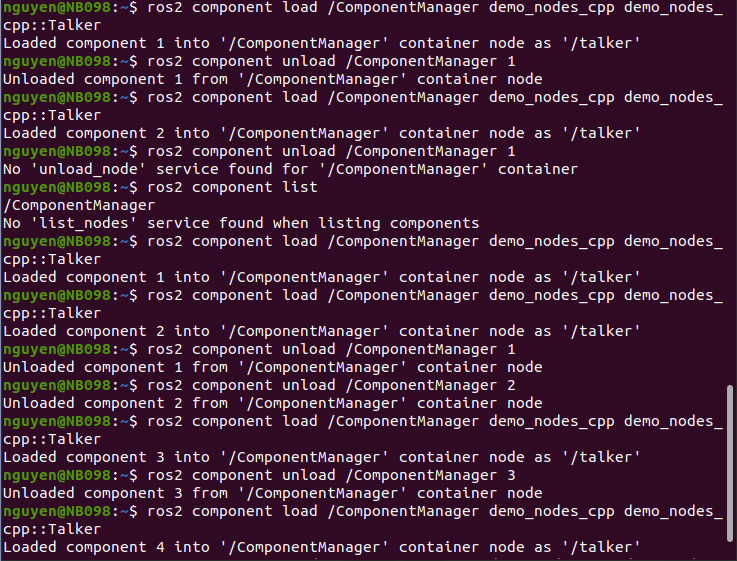
From the instance the 2nd component load in the ComponentManager seem to just fail and all service is unavailable (e.g component list,, load, unload)
Additional information
But if skip the first unload then the ComponentManager will kept running without issue and all service exist.
Terminal output of both error and working case:
with https://github.com/ros2/ros2/commit/4a36f319afcc208deae3c373493ef6d9feda1324, i cannot reproduce the issue.
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component list
/ComponentManager
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
Loaded component 1 into '/ComponentManager' container node as '/talker'
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component list
/ComponentManager
1 /talker
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component unload /ComponentManager 1
Unloaded component 1 from '/ComponentManager' container node
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component list
/ComponentManager
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
Loaded component 2 into '/ComponentManager' container node as '/talker'
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component list
/ComponentManager
2 /talker
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component unload /ComponentManager 2
Unloaded component 2 from '/ComponentManager' container node
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 component list
/ComponentManager
ComponentManger's log.
root@tomoyafujita:~/ros2_ws/colcon_ws# ros2 run rclcpp_components component_container
[INFO] [1643061216.098328013] [ComponentManager]: Load Library: /root/ros2_ws/colcon_ws/install/demo_nodes_cpp/lib/libtopics_library.so
[INFO] [1643061216.101055329] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::Listener>
[INFO] [1643061216.101130779] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::ListenerBestEffort>
[INFO] [1643061216.101158553] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::LoanedMessageTalker>
[INFO] [1643061216.101181811] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::SerializedMessageListener>
[INFO] [1643061216.101204944] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::SerializedMessageTalker>
[INFO] [1643061216.101227611] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::Talker>
[INFO] [1643061216.101249692] [ComponentManager]: Instantiate class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::Talker>
[INFO] [1643061217.105451413] [talker]: Publishing: 'Hello World: 1'
[INFO] [1643061218.105492334] [talker]: Publishing: 'Hello World: 2'
[INFO] [1643061219.105297218] [talker]: Publishing: 'Hello World: 3'
[INFO] [1643061220.105237753] [talker]: Publishing: 'Hello World: 4'
[INFO] [1643061221.105270877] [talker]: Publishing: 'Hello World: 5'
[INFO] [1643061222.105343690] [talker]: Publishing: 'Hello World: 6'
[INFO] [1643061223.105348407] [talker]: Publishing: 'Hello World: 7'
[INFO] [1643061224.105305346] [talker]: Publishing: 'Hello World: 8'
[INFO] [1643061225.105315648] [talker]: Publishing: 'Hello World: 9'
[INFO] [1643061226.105292112] [talker]: Publishing: 'Hello World: 10'
[INFO] [1643061227.105299805] [talker]: Publishing: 'Hello World: 11'
[INFO] [1643061228.105279175] [talker]: Publishing: 'Hello World: 12'
[INFO] [1643061229.105269158] [talker]: Publishing: 'Hello World: 13'
[INFO] [1643061230.105215072] [talker]: Publishing: 'Hello World: 14'
[INFO] [1643061231.105240447] [talker]: Publishing: 'Hello World: 15'
[INFO] [1643061244.753320664] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::Listener>
[INFO] [1643061244.753365262] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::ListenerBestEffort>
[INFO] [1643061244.753373848] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::LoanedMessageTalker>
[INFO] [1643061244.753386572] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::SerializedMessageListener>
[INFO] [1643061244.753398219] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::SerializedMessageTalker>
[INFO] [1643061244.753409482] [ComponentManager]: Found class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::Talker>
[INFO] [1643061244.753421187] [ComponentManager]: Instantiate class: rclcpp_components::NodeFactoryTemplate<demo_nodes_cpp::Talker>
[INFO] [1643061245.757330043] [talker]: Publishing: 'Hello World: 1'
[INFO] [1643061246.757337073] [talker]: Publishing: 'Hello World: 2'
[INFO] [1643061247.757309019] [talker]: Publishing: 'Hello World: 3'
[INFO] [1643061248.757284935] [talker]: Publishing: 'Hello World: 4'
this problem happens only on foxy, but master and galactic. but not sure which commit fixes this problem, any thoughts?
-with foxy. (docker image ros:foxy && apt upgrade)
root@tomoyafujita:~# source /opt/ros/foxy/setup.bash
root@tomoyafujita:~# ros2 component list
/ComponentManager
root@tomoyafujita:~# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
Loaded component 1 into '/ComponentManager' container node as '/talker'
root@tomoyafujita:~# ros2 component list
/ComponentManager
1 /talker
root@tomoyafujita:~# ros2 component unload /ComponentManager 1
Unloaded component 1 from '/ComponentManager' container node
root@tomoyafujita:~# ros2 component list
/ComponentManager
root@tomoyafujita:~# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
Loaded component 2 into '/ComponentManager' container node as '/talker'
root@tomoyafujita:~# ros2 component list
/ComponentManager
No 'list_nodes' service found when listing components
root@tomoyafujita:~# ros2 component list
/ComponentManager
No 'list_nodes' service found when listing components
root@tomoyafujita:~# ros2 component unload /ComponentManager 2
No 'unload_node' service found for '/ComponentManager' container
-with galactic. (docker image ros:galactic && apt upgrade)
root@263f0153ac57:~# source /opt/ros/galactic/setup.bashg
bash: /opt/ros/galactic/setup.bashg: No such file or directory
root@263f0153ac57:~# source /opt/ros/galactic/setup.bash
root@263f0153ac57:~# ros2 component list
/ComponentManager
root@263f0153ac57:~# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
Loaded component 1 into '/ComponentManager' container node as '/talker'
root@263f0153ac57:~# ros2 component list
/ComponentManager
1 /talker
root@263f0153ac57:~# ros2 component unload /ComponentManager 1
Unloaded component 1 from '/ComponentManager' container node
root@263f0153ac57:~# ros2 component list
/ComponentManager
root@263f0153ac57:~# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
Loaded component 2 into '/ComponentManager' container node as '/talker'
root@263f0153ac57:~# ros2 component list
/ComponentManager
2 /talker
root@263f0153ac57:~# ros2 component unload /ComponentManager 2
Unloaded component 2 from '/ComponentManager' container node
root@263f0153ac57:~# ros2 component list
/ComponentManager
@fujitatomoya What happens if you use rmw_cyclonedds_cpp on Foxy, or alternatively rmw_fastrtps_cpp on Galactic or Rolling?
@clalancette nice catch, with foxy and rmw_cyclonedds, it just works.
root@tomoyafujita:/# export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
root@tomoyafujita:/# ros2 component list
1643063179.207462 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
/ComponentManager
root@tomoyafujita:/# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
1643063185.635297 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
Loaded component 1 into '/ComponentManager' container node as '/talker'
root@tomoyafujita:/# ros2 component list
1643063190.111820 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
/ComponentManager
1 /talker
root@tomoyafujita:/# ros2 component unload /ComponentManager 1
1643063195.129578 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
Unloaded component 1 from '/ComponentManager' container node
root@tomoyafujita:/# ros2 component list
1643063198.800767 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
/ComponentManager
root@tomoyafujita:/# ros2 component load /ComponentManager demo_nodes_cpp demo_nodes_cpp::Talker
1643063202.879053 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
Loaded component 2 into '/ComponentManager' container node as '/talker'
root@tomoyafujita:/# ros2 component list
1643063205.983254 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
/ComponentManager
2 /talker
root@tomoyafujita:/# ros2 component unload /ComponentManager 2
1643063211.861358 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
Unloaded component 2 from '/ComponentManager' container node
root@tomoyafujita:/# ros2 component list
1643063215.302212 [0] ros2: using network interface enp4s0 (udp/43.135.133.118) selected arbitrarily from: enp4s0, docker0
/ComponentManager
I can also reproduce the issue with the latest Fast-DDS 2.1.x branch (https://github.com/eProsima/Fast-DDS/tree/0670fb96255e6862c62f185c34cfd7551bd00b08).
@MiguelCompany Can you think of a change between 2.1.x and v2.3.1 that might fix this?