Planning request adapters: short-circuit if failure, return code rather than bool
Description
Previously, if one of the planning request adapters failed, the pipeline would continue onward anyway. Also, only a bool was returned, although moveit_msgs::MoveItErrorCodes.msg has some enums to report more detail.
This PR short-circuits in case there is an adapter failure and reports the actual error code.
For example, here's the output when there are 6 adapters and FixStartStateCollision fails:
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588225372] [moveit_ros.fix_start_state_collision]: Running 'Fix Start State In Collision'
[moveit_cpp_tutorial-4] [WARN] [1665063576.588230842] [moveit_ros.fix_start_state_collision]: Unable to find a valid state nearby the start state (using jiggle fraction of 0.020000 and 100 sampling attempts).
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588242808] [moveit.planning_request_adapter]: Adapter result: -10
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588261618] [moveit.planning_request_adapter]: Adapter result: -10
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588265353] [moveit.planning_request_adapter]: Adapter result: -10
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588267620] [moveit.planning_request_adapter]: Adapter result: -10
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588291731] [moveit.planning_request_adapter]: Adapter result: -10
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588300902] [moveit.ros_planning.planning_pipeline]: Res return: -10
[moveit_cpp_tutorial-4] [ERROR] [1665063576.588302635] [moveit.ros_planning_interface.planning_component]: Could not compute plan successfully
A code of -10 means "START_STATE_IN_COLLISION" :+1:
Prior to this PR, the output would be:
[moveit_cpp_tutorial-4] [ERROR] [1665067792.760674407] [moveit.planning_request_adapter]: Adapter result: 0
[moveit_cpp_tutorial-4] [ERROR] [1665067792.760687109] [moveit.planning_request_adapter]: Adapter result: 0
[moveit_cpp_tutorial-4] [ERROR] [1665067792.760691608] [moveit.planning_request_adapter]: Adapter result: 0
[moveit_cpp_tutorial-4] [ERROR] [1665067792.760693864] [moveit.planning_request_adapter]: Adapter result: 0
[moveit_cpp_tutorial-4] [ERROR] [1665067792.760695824] [moveit.planning_request_adapter]: Adapter result: 0
[moveit_cpp_tutorial-4] [ERROR] [1665067792.760701750] [moveit.ros_planning.planning_pipeline]: Res return: 0
[moveit_cpp_tutorial-4] [ERROR] [1665067792.760704577] [moveit.ros_planning_interface.planning_component]: Could not compute plan successfully
Which is not very useful for debugging.
Testing this PR
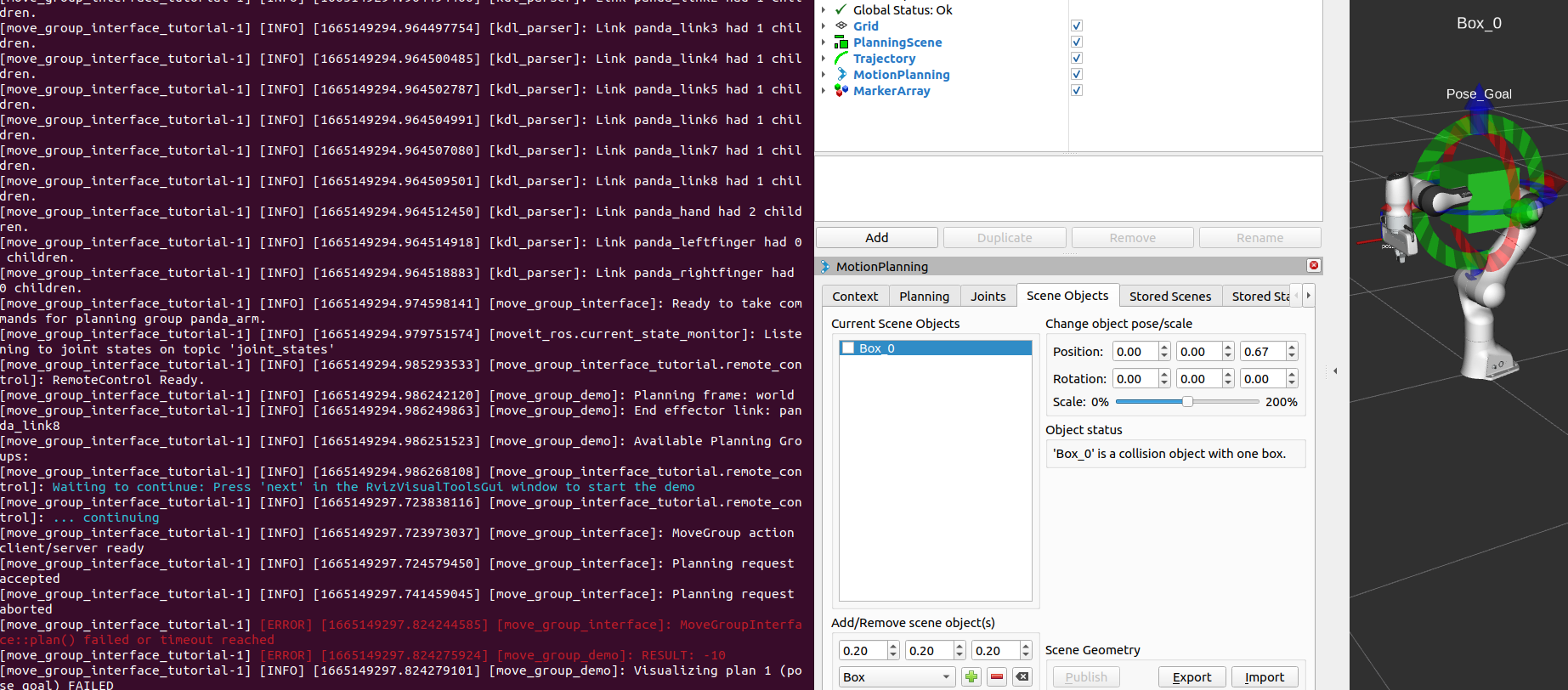
I've been testing with the move_group_interface tutorial. You can publish collision objects conveniently from the GUI:
ros2 launch moveit2_tutorials move_group.launch.py
ros2 launch moveit2_tutorials move_group_interface_tutorial.launch.py
This image shows a START_STATE_IN_COLLISION result code.
Codecov Report
Base: 51.09% // Head: 51.08% // Decreases project coverage by -0.02% :warning:
Coverage data is based on head (
180d315) compared to base (749c5ae). Patch has no changes to coverable lines.
Additional details and impacted files
@@ Coverage Diff @@
## main #1605 +/- ##
==========================================
- Coverage 51.09% 51.08% -0.01%
==========================================
Files 381 381
Lines 31746 31746
==========================================
- Hits 16217 16213 -4
- Misses 15529 15533 +4
| Impacted Files | Coverage Δ | |
|---|---|---|
| ...nning_scene_monitor/src/planning_scene_monitor.cpp | 45.29% <0.00%> (-0.43%) |
:arrow_down: |
Help us with your feedback. Take ten seconds to tell us how you rate us. Have a feature suggestion? Share it here.
:umbrella: View full report at Codecov.
:loudspeaker: Do you have feedback about the report comment? Let us know in this issue.